
上海花博会的黑科技:扫地僧太阳能环卫机器人
- 字号
- 放大
- 标准
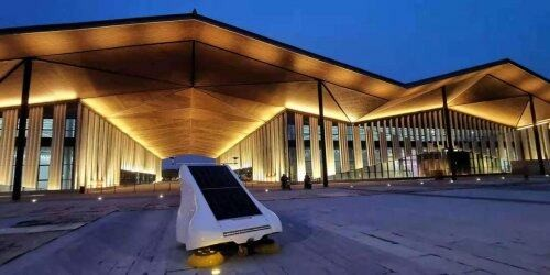
上海花博会的物业运营方光明物业通过引入6台扫地僧无人驾驶机器人。扫地僧每小时清扫面积高达2万平方米,可以轻松替代20个环卫人员的室外清扫作业量,完成大部分花博会主要干道上的道路清扫工作。

夏季的上海正午气温炎热,地面温度时常高达40度以上,为了避免传统物业人员室外作业期间中暑和晕厥,扫地僧独到的太阳能光伏板恰好把十小时的暴晒转化为四度电,能够支持扫地僧十小时的作业时间。这样100%光伏供电的系统也成为全球首个碳中和的物业环卫解决方案。
扫地僧的清洁机器人计通过太阳能充电,自主收集垃圾以及倾倒垃圾。扫地僧清扫宽度2米几乎适合所有道路。扫地车的驱动方式是轮毂电机。车身尺寸:2000mm×2000mm×2000mm,垃圾箱容积高达300L。车前的双雾化头和100L水箱保障抑尘功能,产品尾部的负压通风保障了尘土的有效控制。扫地僧的双目宽动态广角感知算法能够通过1600mm的基线距离能够感知100米外的障碍物。其独到的六个CPU和高性能GPU和一个算力每秒三万亿次的神经网络单元带来了强大的机器视觉计算能力。
为了实现无人驾驶,扫地僧自建光学实验室,通过独立研发镜头和光路算法首创360×220×2的双目鱼眼摄像头,这样可以实现环视的环境分类识别,地面路面感知和双目点云的同步建模。扫地僧建立几何实验室,加上斜置激光雷达,能够检测地面倾斜和坑洼状态。扫地僧独立研发的激光雷达数据处理算法可以实现快速高效的感知—路径一体化方案。同时扫地僧还装置有八个超声波雷达确保独立的避障冗余判断。扫地僧的路径规划采用视觉引导+GPS策略,规避了传统的RTK定位的突发性定位紊乱带来的风险。
扫地僧由全球领先的剑桥大学学者团队研发。通过机器学习和人工智能算法实现不同场景和环境下的环境感知和决策,并且通过自主可控的人工智能芯片来实现边缘计算。

扫地僧创始人陈硕提到,扫地僧已经在筹划独立的造车厂投资计划,并将于2025建成全球最大的环卫机器人生产线。
责任编辑:陈运欣