
Zusammenfassung
Es werden verschiedene Facetten zum Thema „Sensoren“ beleuchtet. Dazu gehören die Erläuterungen z. B. zu Elementarsensor, Robotersensoren und physikalische Zusammenhänge ebenso, wie typische Eigenschaften, Anwendungen und Signalzustände. Aufgaben und nutzbare Effekte vervollständigen diesen ersten Überblick. Der Leser bekommt einen Eindruck über die Häufigkeit in der fertigungstechnischen Automatisierung sowie die einsetzbaren physikalisch‐technischen Möglichkeiten. Eine kurze Auflistung der Schritte zur Auswahl eines Sensors beschließt das Kapitel.
Es werden verschiedene Facetten zum Thema „Sensoren“ beleuchtet. Dazu gehören die Erläuterungen z. B. zu Elementarsensor, Robotersensoren und physikalische Zusammenhänge ebenso, wie typische Eigenschaften, Anwendungen und Signalzustände. Aufgaben und nutzbare Effekte vervollständigen diesen ersten Überblick. Der Leser bekommt einen Eindruck über die Häufigkeit in der fertigungstechnischen Automatisierung sowie die einsetzbaren physikalisch‐technischen Möglichkeiten. Eine kurze Auflistung der Schritte zur Auswahl eines Sensors beschließt das Kapitel.
1.1 Was sind Sensoren?
Ein Lebewesen ist nur existenzfähig, wenn es auf Umwelteinflüsse reagieren kann. Selbst Einzeller haben diese Fähigkeit entwickelt. Um spezifische Reize aus der Umgebung oder aus dem Körperinnern aufzunehmen, existieren biologische Strukturen, die als Rezeptor bezeichnet werden. Man unterscheidet zwei Arten:
-
Exterorezeptoren
Sie dienen zur Orientierung im Raum und nehmen Reize aus der Umwelt auf.
-
Interorezeptoren
Mit ihnen werden Reize aus dem Innern eines Organismus aufgenommen.
Die Sinnesphysiologie lehrt, dass jede Wahrnehmung über ein Sinnesorgan aus zwei Teilprozessen besteht. Der äußere Reiz wird vom Rezeptor in eine Nervenendigung umgesetzt. Der betroffene Nerv leitet das erzeugte elektrische Signal zum Zentralnervensystem (Gehirn) weiter. Dort erst entsteht ein Sinneseindruck (Wahrnehmung, Empfindung). Der Mensch besitzt etwa 109 bis 1011 Rezeptoren (receptors).
Inzwischen ist die Technik in ihrer Entwicklung derart fortgeschritten, dass sie ebenfalls Rezeptoren hervorbringen kann. Sie sind künstlich hergestellt und werden als Sensoren bezeichnet. Eingebaut in Maschinen, Vorrichtungen, medizinischen Geräten, Anlagen, Fahrzeugen, Kaffeemaschinen und vielen anderen Erzeugnissen verleihen sie diesen die Fähigkeit, eigenständig auf bestimmte Zustände zu reagieren und diese zu kontrollieren. Sensoren übertragen das Wahrnehmungsvermögen des Menschen auf Maschinen. Dabei können den fünf Sinnen des Menschen entsprechende Sensortypen in Tab. 1.1 gegenübergestellt werden.
Hinzu kommen noch weitere chemische, physikalische oder auch biologische Messgrößen, die den menschlichen Sinnen nicht zugänglich, aber mit Sensoren erfassbar sind.
In den letzten Jahren hat sich der Einsatz von Sensoren überdurchschnittlich gut entwickelt. In Zukunft darf man erwarten, dass fast alles von der Maschine bis zum Gebrauchsgegenstand mehr oder weniger sensorisiert sein wird. Große Bedeutung wird dabei den Mikrosystemen zukommen. Sensor und Signalverarbeitung werden miteinander verschmelzen. Der Übergang zur sensorgestützten Maschinerie bedarf intensiver Auseinandersetzung mit den Möglichkeiten und Verfahren der Sensorik (sensorics). Dazu soll dieses Buch beitragen.
Was wird unter einem Sensor verstanden?
Der Sensor ist ein technisches Bauteil, das aus einem Prozess zeitvariable physikalische oder auch elektrochemische Größen erfasst und in ein eindeutiges elektrisches Signal umsetzt.
Diejenige Baueinheit, die aus einem (mechanischen) Umsetzelement und einem elektrischen Sensorelement besteht, nennt man Elementarsensor oder Messwertaufnehmer (Abb. 1.1).

Prinzipanordnung eines Sensors. 1 Eingangssignal, 2 Ausgangssignal
Der Begriff „Sensor“ kommt vom Lateinischen sensus für Gefühl bzw. Empfindung (sensualis = die Sinne betreffend) und fand erst in den 1970er‐Jahren Eingang in die Fachliteratur. Vorher sprach man von Aufnehmern, Wandlern, Gebern, Meldern, Messfühlern, Initiatoren, Transducern und Transmittern. In der DIN/VDE‐Richtlinie 2600 wird der Begriff „Sensor“ als englische Übersetzung für Fühler angegeben. Die Genauigkeit bzw. Ungenauigkeit eines Sensors wird durch die Eigenschaften Linearität, Hysterese und Drift (Offset) beschrieben.
Wird der Messfühler (Elementarsensor) mit Hilfsenergie versorgt, dann handelt es sich um einen passiven Sensor . Das sind Impedanzen, die durch die physikalische Messgröße verändert werden (Abb. 1.2). Es sind hohe Genauigkeiten erreichbar.

Beispiele für passive Sensoreffekte
Aktive Messfühler sind Energiewandler (Spannungserzeuger). Sie wandeln eine zu messende nichtelektrische physikalische Größe oder chemische Veränderungen direkt in ein elektrisches Signal um. Dazu gehören z. B. Thermo‑ und Fotoelemente sowie piezoelektrische Fühler. Letztere wiederum können z. B. nur für dynamische Kräfte verwendet werden, nicht aber für statisch anfallende Messgrößen. Ziel der Messtechnik ist es, bei aktiven Sensoren die nichtelektrische Energie direkt, also ohne Zwischenschalten weiterer Energieformen, in elektrische Energie umzusetzen. Bei passiven Sensoren versucht man, die Zahl der Messglieder so klein wie möglich zu halten. Aktive Messfühler erreichen oft nur eine geringe Genauigkeit, vor allem bezüglich der Langzeitstabilität. Daraus resultiert, dass man oft eine häufigere Kalibrierung hinnehmen muss.
In der Robotertechnik, vor allem bei autonomen mobilen Robotern die sich in einer Outdoor‐Umgebung frei bewegen können, ist eine Einteilung der Sensoren in interne und externe Sensoren aktuell. Die Abb. 1.3 zeigt eine Übersicht.

Gliederung der Sensoren für autonome mobile Roboter
Externe Sensoren (external sensors) dienen zum Aufnehmen von Messsignalen aus der Umwelt. Das sind beispielsweise Sensoren für Licht, Wärme, Schall (Mikrofon), Kollision mit Hindernissen, physikalische Größen im technischen Prozess, Entfernungen, Objektkonturen und Umweltbilder (Kamera). Der Umfang an externe Sensoren hängt von Art und Komplexität der vorgesehenen Einsatzumgebung ab. Bei bewegten Systemen spielen auch Zeitanforderungen eine Rolle.
Interne Sensoren (internal sensors) erfassen die inneren Zustände eines Roboters, wie z. B. Position und Orientierung des Roboterarms und von Endeffektoren, Geschwindigkeiten mit der sich Gelenke bewegen, Innentemperatur, Batteriestand bei autonomen mobilen Robotern, Motorstrom, Kräfte und Momente. Beispiele sind u. a. auch Gyroskope, Rad‐Encoder, Neigungs‑ und Beschleunigungssensoren. Für interne Sensoren gilt allgemein, dass ihre Messsignale eindeutig interpretiert werden können, da der Zusammenhang zwischen Messgröße und Messsignal durch die Konstruktion festgelegt und somit eindeutig bekannt ist.
Insgesamt hat die Sensorisierung von mobilen autonomen Robotern die Aufgabe, eine gewisse Autonomie zu erreichen. Ein technisches System ist autonom, wenn es bei der Ausführung eines gegebenen Auftrags selbstständig Entscheidungen treffen kann, die zum Erreichen des Zieles notwendig sind. Sensorik, Software und Selbstorganisation können dazu beitragen.
Ein Sensorsystem besteht aus Sensor und Messobjekt, zwischen denen zum Zeitpunkt der Messung eine Wirkungsübertragung stattfindet. Außerdem gibt es Wirkungsverbindungen mit der Umwelt. Ein Sensorsystem ist nichts Statisches, sondern verändert mehr oder weniger seinen Zustand. Das kann durch eine Verhaltensfunktion Γ allgemein beschrieben werden, die die Zusammenhänge zwischen den im System auftretenden Variablen widerspiegelt. Das System wird insgesamt charakterisiert durch die Umgebung, die Verhaltensfunktion Γ und die Struktur.
- u i :
-
Eingangsvariable
- q :
-
Zustand des Systems
- E :
-
Systemelemente
- dq/dt:
-
Zustandsänderung
- x i :
-
Ausgangsvariable
- t :
-
Zeit
Für die Zukunft kristallisieren sich für die nächsten Sensorgenerationen folgende Tendenzen heraus:
-
Größere Vorwärtsintegration; also mehr Intelligenz im Sensor und weniger Leistungsbedarf
-
Miniaturisierung durch Mikroelektronik und Mikrosystemtechnik (Kleinstgehäuse)
-
Senkung der Kosten durch Massenfertigungsverfahren und modularen Sensoraufbau
-
Entwicklung von Kommunikationsstandards für Sensorsysteme (Bussysteme, Kommunikation zwischen Feld‑ und Leitebene, Diagnoseabfragen, Fehlersuche)
-
Wesentlich reduzierter Installations‑ und Verdrahtungsaufwand; einfache Einbindung von Sensoren und Aktoren in ein Busnetzwerk, drahtlose Signalübertragung (Sensornetze)
-
Bessere Kombinationsmöglichkeiten von Geräten unterschiedlicher Hersteller
-
Robustere Messverfahren, die weitgehend störungssicher sind
Sensoren werden zunehmend auch mit weiteren Funktionen ausgestattet. Dazu gehören die Selbstüberwachung und die Selbstkalibrierung von Sensoren. Man braucht dazu spezielles Wissen über die Eigenschaften und vor allem über das Sensorverhalten sowie über die Vertrauensgrenzen der Sensorgrößen. Letztlich werden Regeln gebraucht, nach denen aus bestimmten Reaktionen ein definierter Eingriff selbsttätig abzulaufen hat. Außer den Regeln muss der Sensor natürlich auch hardwareseitig für den Selbsttest und die Einstelloperationen tauglich sein. Das Prinzip wird in Abb. 1.4 als Schema gezeigt.

Selbstüberwachung und Selbstkalibrierung von Sensoren
In jüngster Zeit ist man bemüht, die Fortschritte in der Mikrosystemtechnik auszunutzen, um Sensorsysteme aus modularen Komponenten anforderungsgerecht zusammenzubauen. Wie aus der Abb. 1.5 ersichtlich ist, denkt man an eine „Turmbauweise“, bei der die jeweils erforderlichen Module vertikal zu einem Stapel verbunden werden. Voraussetzung ist die Definition von elektrisch und geometrisch standardisierten Schnittstellen. Die Komponenten können dann in großer Stückzahl hergestellt werden und gehen in spezifisch zusammengestellte Sensoren ein, so wie sie aktuell in kleinen Stückzahlen vom Markt verlangt werden.

Schematischer Aufbau eines modularen Sensorsystems. 1 Messgröße, 2 digitaler Ausgang
Für den Übergang von Messaussagen von der nichtelektronischen Welt in elektrisch bzw. elektronisch auswertbare Größen werden überwiegend die in Abb. 1.6 angegebenen technisch‐physikalischen Zusammenhänge ausgenutzt [1].

Eigenschaften von Objekten werden vom Sensor in elektrische Größen verwandelt. p Druck, l Weg, Abstand, pH Ionenkonzentration, n Drehzahl, ∆t Zeitintervall, \( v\) Geschwindigkeit, C Kapazität, B Flussdichte, E elektrische Feldstärke, F Feuchte, H magnetische Feldstärke, Q Schwingkreisgüte, R Widerstand, T Temperatur, U Spannung, VQ Volumendurchsatz, W elektrische Energie, ∆R Widerstandsänderung, % Gaskonzentration in Volumenprozent, ω Winkelgeschwindigkeit, γ Lichtquant
Wie die Wandlung vor sich gehen kann, d. h. welche physikalischen Verknüpfungen beispielsweise verwendbar sind, wird in der Tab. 1.2 erklärt. Die Zahlen 1 bis 18 sind als Zeilennummerierung angegeben. Dort findet man in der ersten Spalte die Gleichung, welche die nichtelektrische Größe mit der elektrischen verknüpft. Diese Tabelle enthält Beispiele und ist somit nicht vollständig. Sie zeigt aber, auf welche vielfältige Weise physikalische und elektrotechnische Effekte für die Sensoren zur Anwendung kommen. In den einzelnen Kapiteln wird auf diese Grundlagen noch ausführlicher eingegangen.
1.2 Einteilung und Begriffe
Im Umfeld des Hauptbegriffes „Sensor “ gibt es viele weitere Termini. Geht die Informationsverarbeitung über einfache Vorstufen hinaus und sind alle elektrischen Funktionen in einem Halbleiterbaustein untergebracht, bezeichnet man das auch als „intelligenten“ Ein‐Chip‐Sensor . Auch die werbewirksame Bezeichnung smart sensor wird verwendet.
Weitere Begriffe sind:
Sensorelement, Elementarsensor, Messfühler
Bezeichnungen für das eigentliche Wandlerelement, welches über den physikalischen Effekt eine nichtelektrische Größe in eine elektrische Größe wandelt. Das geschieht mitunter auf dem Weg der Abbildung über eine Zwischengröße.
Sensorsystem
Bezeichnung für ein System, das aus mehreren Mess‑ und Auswertungskomponenten besteht und bei dem zum Zeitpunkt der Messung eine Wirkungsübertragung stattfindet, an der Sensor, Messobjekt und Umwelt beteiligt sind. Es verfügt über einen wesentlichen Anteil an Signalaufbereitungsfunktionen.
Multisensorsystem
Bezeichnung für ein System, das aus mehreren Einzelsensoren besteht, wobei diese gleichzeitig Messgrößen aufnehmen (Abb. 1.7). Sie sind vorwiegend als Halbleitersensoren ausgeführt und deshalb sehr platzsparend [2].

Prinzip der Datenintegration bei Multisensoren. Si Sensorelement
Multisensorielle Ansätze können auf drei Arten ausgelegt werden:
-
Sensorkombination mit unterschiedlichen Messprinzipien, z. B. taktil, visuell, akustisch (heterogen)
-
Sensorkombination mit demselben Messprinzip an verschiedenen Orten des Systems (homogen)
-
Einzelsensor für die Erkennung mehrerer zueinander in Relation stehender Ereignisse, z. B. bewegter Objekte
Beim Einsatz von Multisensoren kann ein Ziel z. B. die Erhöhung der Zuverlässigkeit des Messwertes sein. Die Messwerte der Einzelsensoren werden zu einer Gesamtaussage verdichtet, wobei keine bloße Aufrechnung erfolgt, sondern eine gewichtete Auswertung. Möglicherweise muss ein Training an charakteristischen Umgebungen erfolgen, damit man zu den richtigen Gewichtsfaktoren kommt.
Beispiel Gassensor
Es werden Temperatur‑, Feuchte‑ und Druckschwankungen zusätzlich mit erfasst, um zu einer präzisen Aussage zu kommen (multistate sensor).
Eine andere Unterscheidung der Sensoren ist die in Binär‑, Digital‑ und Analogsensoren.
Binärsensoren sind zweiwertige Schalter, die nur mit den beiden elektrischen Schaltsignalen EIN oder AUS arbeiten, wie z. B. Näherungssensoren, Druck‑ oder Temperaturschalter.
Analogsensoren liefern dagegen einen stetigen physikalischen Messwert, meistens als Spannung, z. B. 0 bis 10 Volt, oder Strom, z. B. 0 bis 20 mA bzw. 4 bis 20 mA. Dazu gehören Sensoren für Wege, Winkel, Kräfte und z. B. für den Durchfluss. Durch Kalibrieren können Sensoren auch als Messwertgeber verwendet werden. Unter Kalibrieren versteht man nach DIN 1319 das Feststellen des Zusammenhangs zwischen Messgröße (wirklichem Wert) und Anzeige (Messwert).
Beispiel
- Messgröße:
-
= 10,00; Anzeige = 10,86
- Kalibrieren:
-
= Angleichen der Anzeige auf 10,00
In diesem Sinne werden die Sensoren auch nach dem Grad der Erfassungsfähigkeit eingeteilt in
-
Messende Sensoren, die mit 2 bit und mehr arbeiten (Messen: Vergleichen mit einem Normal und Abzählen, wie oft die Normaleinheit in der zu messenden Größe enthalten ist.)
-
Erfassende Sensoren, die mit nur einem einzigen bit auskommen. (Abzählen reduziert sich auf das Feststellen, ob die Messgröße den Vorgabewert über‐ bzw. unterschreitet.)
Beispiel Pneumatikzylinder
In Abb. 1.8 werden Pneumatikzylinder gezeigt, bei denen die Kolbenstellung mit Sensoren abgefragt wird. Bei der Lösung nach Abb. 1.8a trägt der Kolben einen Magnetring und über induktive Schalter werden nur die Endstellungen erfasst (s. auch Abb. 2.1). Beim Aufbau nach Abb. 1.8b ist die Kolbenstange dagegen mit Magnetelementen im Wechsel von Nord‑ und Südpolen besetzt, so dass eine Wegmessung über den gesamten Kolbenhub stattfinden kann. Es ist ein inkrementales digitales System.

Pneumatikzylinder mit Sensoren. a Endlagenerfassung mit induktiven Näherungssensoren, b Wegmessung mit digital‐magnetischer Kolbenstange, 1 Magnetring, 2 induktiver Näherungssensor, 3 Kolbenstange mit Magnetelementen, 4 Impulsgeber
Jeder Erkennung von Objekteigenschaften mit Hilfe von Sensoren liegt das Prinzip zugrunde, dass Energie irgendeiner Form durch das Objekt verändert bzw. moduliert und die dadurch aufgeprägte Information vom Sensor analysiert wird. Man kann die Sensoren auch nach der Energieform in Arten einteilen (Tab. 1.3).
Die jeweils wirkenden physikalischen Grundgesetze bestimmen dabei wesentliche Eigenschaften der Sensoren und auch ihre Anwendungsgrenzen.
Eine Einteilung der Sensoren ist nach vielen weiteren Gesichtspunkten möglich, so z. B. nach den Hauptanwendungsgebieten. Man kann unterscheiden in Sensoren für Chemie, Dynamik, Gase und Flüssigkeiten, Geometrie, Mechanik u. a. oder man teilt nach Wirkprinzipien ein, wie z. B. in Ultraschallsensoren, induktive und kapazitive Sensoren u. a. Für die Maschinen‑ bzw. Fabrikautomatisierung könnte man die Sensoren sehr detailliert auch in folgende Gruppen einteilen:

Sensoren müssen im Übrigen als Konstruktionsteile verstanden werden und so gestaltet sein, dass sie in ein Ensemble anderer Bauteile und Baugruppen eingehen können. Deshalb muss ihre Ausfallwahrscheinlichkeit klein sein. Wichtige Eigenschaften sind auch Störgrößenempfindlichkeit (Querempfindlichkeiten ) und Selbstjustierungsfähigkeit. Abhängig von der Aufgabenstellung spielen die folgenden messtechnischen Begriffe bei der Beurteilung und bei der Auswahl eine mehr oder weniger große Rolle:
Auflösung (resolution)
Sie gibt die kleinstmögliche Veränderung am Objekt an, die noch eine messbare Änderung am Ausgangssignal bewirkt.
Linearität (linearity)
Das ist ein Maß für die Abweichung der Kennlinie des Ausgangssignals von einer Geraden.
Ansprechzeit (response time)
Darunter versteht man jene Zeit, die der Signalausgang braucht, um den maximalen Signalpegel zu erreichen.
Wiederholgenauigkeit (repetition accuracy)
Das ist die Differenz von Messwerten aufeinanderfolgender Messungen innerhalb einer bestimmten Zeit und Umgebungstemperatur.
In der Abb. 1.9 werden diese Begriffe am Beispiel von Sensoren zur Distanz‐ und Positionsmessung nochmals grafisch erklärt.

Wichtige messtechnische Begriffe am Beispiel von Abstandssensoren. a Auflösung, b Wiederholgenauigkeit, c Linearität, d Ansprechzeit
Einige weitere Begriffe aus der Messtechnik werden im Kap. 10 (Fachbegriffe) aufgeführt.
Wichtig ist in jedem Fall, dass der Wert der Messgröße innerhalb des Messbereiches (measuring range) eines Sensors bzw. Messgerätes liegt. Nur dann kann man sich auf die vereinbarten Fehlergrenzen verlassen. Man kann von der Einteilung nach Abb. 1.10 ausgehen.

Definition Messbereich
Die zeitliche Folge von Messwerten bezeichnet man als Signale. Ein Signal kann verschiedene Formen annehmen und ist eine zeitvariable physikalische Zustandsgröße. Die Signalformen werden wie folgt systematisiert:
Deterministische Signale
Der Signalwert ist zu jedem beliebigen Zeitpunkt verfügbar. Man unterscheidet weiterhin in analoge und diskrete Signale (Abb. 1.11).

Charakteristische Signaltypen im zeitlichen Verlauf. analog = kontinuierlich, stufenlose Werte, diskret = durch endliche Intervalle voneinander getrennt stehende Werte, kontinuierlich = unaufhörlich, durchlaufend, diskontinuierlich = aussetzend, unterbrochen
Stochastische Signale
Sie haben einen regellos, zufällig schwankenden Signalverlauf. Rein stochastische Signale sind nur mit statistischen Methoden auswertbar.
Signalgemische
Das sind deterministische Signalformen mit einem stochastischen Anteil (Rauschen). Das Rauschen ist unerwünscht und wird mit elektronischen Mitteln unterdrückt. Sensoren und elektronische Signalverarbeitungsgeräte mit einem geringen Eigenrauschen werden besonders für die Erfassung sehr kleiner Messgrößen eingesetzt.
Große Bedeutung haben in der Fertigungsautomatisierung Sensoren, die eine Annäherung an Objekte detektieren. Die meisten Annäherungssensoren geben einen Output ab, der der Entfernung von Sensor zum Objekt äquivalent ist. Das geschieht auf zwei Arten:
-
Der Sensoroutput wächst mit dem Abstand zum Objekt, wie z. B. bei der Messung von Licht‑ und Schalllaufzeiten.
-
Der Sensoroutput wird kleiner, wenn sich die Entfernung zum Objekt vergrößert, was z. B. bei der Abstandsmessung mit elektromagnetischen Feldern der Fall ist.
Einiges zum Begriff der Information:
Das Wort ist bereits in der Wissenschaftssprache des 19. Jahrhunderts nachweisbar. Zum Inhalt zählte man folgende Gegebenheiten:
-
1.
Absender: Das können Lebewesen ebenso sein, wie Maschinen und Messgeräte.
-
2.
Empfänger: Dazu zählt man Menschen, aber auch entsprechend ausgelegte Vorrichtungen, Maschinen und elektronische Geräte.
-
3.
Text: Das sind Beschreibungen, Befehle, Verbote, Empfehlungen, Messwerte u. a.
-
4.
Form: Hier sind nicht nur beliebige Sprachen aktuell, sondern auch codierte Notationen, Signalcodes des Nervensystems oder ein chemischer Code, z. B. zur Fixierung von Erbmerkmalen.
-
In der DIN 44300 hat man dazu Folgendes festgelegt:
-
Information: Sinngehalt der Nachricht (was mitgeteilt werden soll)
-
Nachricht: Sie besteht aus Information und Signal und wird unverändert weitergegeben.
-
Signal: Das ist die physikalische Realisierung (wie es mitgeteilt wird).
-
Daten: Sie werden im Gegensatz zu Nachrichten verändert und weiterverarbeitet.
-
Informationsparameter einer physikalischen Größe bzw. eines Signalträgers bilden den Werteverlauf einer zu signalisierenden Größe ab. Das können nach Abb. 1.12 die folgenden sein:
-
Phasendifferenz periodischer Vorgänge,
-
Impulsbreite,
-
Impulshöhe,
-
Amplitude.
Ein wichtiges Bauteil soll hier noch erwähnt werden. Es sind in elektrisch/elektronischen Systemen die Optokoppler . Sie sorgen für die galvanische Trennung von Stromkreisen bei trotzdem logischer Verbindung. Die Weitergabe von elektrischen Signalen erfolgt über eine kurze Lichtstrecke. Das eingehende elektrische Signal wird in ein Lichtsignal umgesetzt. Ein Lichtsender (Infrarot-LED) sendet seine Signale an einen unmittelbar gegenüberliegenden Lichtempfänger, z. B. einen Fototransistor (Abb. 1.13). Man bezeichnet das Bauelement auch als Optoisolator, weil es empfindliche Schaltkreise vor elektrischen Störgrößen schützt, beispielsweise vor Beschädigungen durch Überspannungen in einem anderen Teil des Schaltkreises. Die Störsicherheit kann dadurch drastisch erhöht werden.
Abb. 1.12 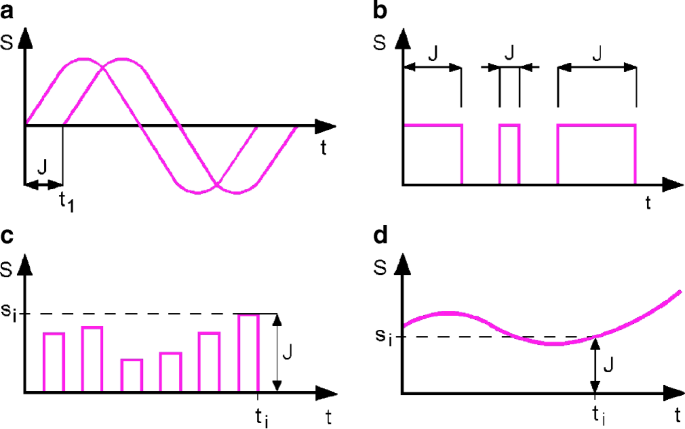
Informationsparameter. a Phasendifferenz, b Impulsbreite, c Impulshöhe, d Amplitude, J Informationsparameter, S Signal, t Zeit
Abb. 1.13 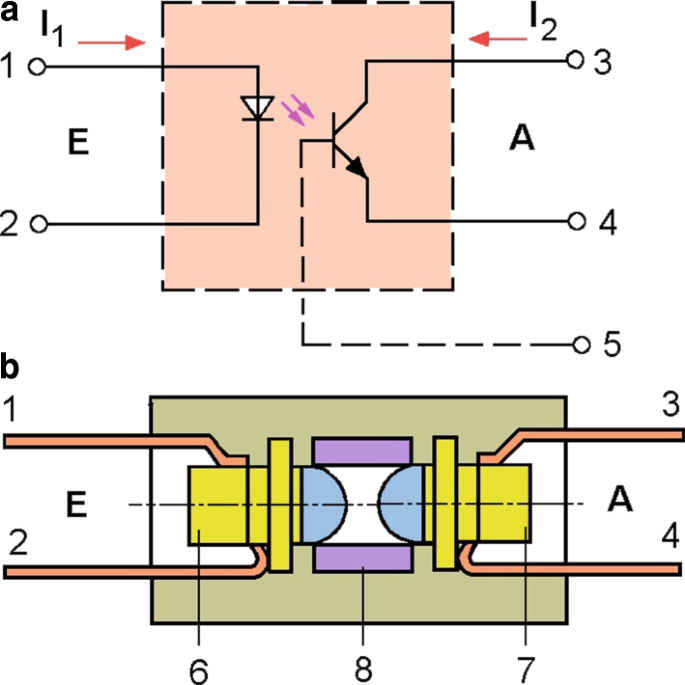
Aufbau eines Optokopplers. a Schaltplansymbol, b Querschnitt, 1 Anode, 2 Kathode, 3 Kollektor, 4 Emitter, 5 Basis, 6 Leuchtdiode, 7 Fototransistor, 8 optische Übertragungsstrecke, A Ausgangskreis, E Eingangskreis
-


1.3 Aufgaben und nutzbare Effekte
Wofür braucht man Sensoren in der Fabrik? Die Sensortechnik ist für die Produktion eine Notwendigkeit und macht die Realisierung von Fertigungsverfahren oft überhaupt erst durchführbar. Sensoren und Sensorsysteme müssen In-line in die Prozesse eingebunden sein, um eine real time Prozessbeherrschung zu ermöglichen, die Verfügbarkeit der Prozessanlagen zu erhöhen und Nebenzeiten drastisch zu reduzieren [3]. Die sensorischen Anwendungen überspannen einen immer größer werdenden Bereich. Die Abb. 1.14 zeigt eine Gliederung nach Aufgaben bzw. nach Messgrößen. Zustandsgrößen sind über alle Teilprozesse, den innerbetrieblichen Transport und die Montage verteilt. Sensorisierte Maschinensteuerungen ermöglichen die regelungstechnische Führung von Handhabungs- und Fertigungsprozessen. Das Ziel ist im Allgemeinen eine Vereinfachung und Optimierung des Ablaufs, der Fertigungs- und Hilfsprozesse.

Aufgaben von Sensorsystemen in der Produktion, nach [3]
In den 1930er Jahren begann man erstmals Fotozellen für das Sortieren von Reiskörnern, Bohnen und Zigarren nach ihrer Farbe einzusetzen. Dann folgte die Kontrolle von Konservendosen auf richtige Etikettierung. Bei einer amerikanischen Firma konnte man schon bald 14 Arbeitskräfte einsparen, nachdem man bei der Kontrolle von Nockenwellen Fotozellen eingesetzt hatte. Was bei James Watt galt, das gilt auch heute noch: Niemand kann etwas zielgerecht steuern oder regeln, was er nicht vorher gemessen hat.
Es gibt etwa 5000 physikalische und chemische Effekte in der unbelebten Natur, die man als Wirkprinzip für Sensoren einsetzen kann. Davon werden heute in der Praxis etwa 150 für Sensoren ausgenutzt.
Wie kann nun eine zu messende Größe aufgenommen werden?
-
Über einen direkten mechanischen Kontakt oder über ein mechanisches Koppelsystem (taktiler Sensor),
-
über ein auf Nahwirkung (Annäherung) beruhendem Arbeitsprinzip (approximativer Sensor) oder
-
über ein abbildendes System, bei dem die Entfernung zum Messobjekt keine direkte Bedeutung für die sensorische Auswertung besitzt (Kamera mit Bildverarbeitungssystem).
Welche Größen müssen in der alltäglichen Produktionspraxis erfasst bzw. gemessen werden und welche Effekte lassen sich dafür ausnutzen?
Erfassung mechanischer Größen
-
Induktionsgesetz
-
piezoelektrischer Effekt und reziproker piezoelektrischer Effekt
-
Abhängigkeit des elektrischen Widerstandes von geometrischen Größen
-
Änderung des spezifischen Widerstandes unter mechanischer Spannung
-
Kopplung zweier Spulen über einen Eisenkern
-
Abhängigkeit der Induktivität einer Spule vom magnetischen Widerstand/Wirbelströmen
-
Abhängigkeit der Kapazität eines Kondensators von geometrischen Größen
-
Änderung der relativen Permeabilitätszahl unter mechanischer Spannung
-
Abhängigkeit der Eigenfrequenz einer Saite oder eines Stabes von mechanischen Spannungen
-
Wirkdruckverfahren
-
Erhaltung des Impulses (Coriolis‐Durchflussmesser)
-
Wirbelbildung hinter einem Störkörper
-
Durchflussmessung über die Erfassung des Wärmetransportes
-
Abhängigkeit der Schallgeschwindigkeit von der Geschwindigkeit des Mediums
Erfassung thermischer Größen
-
thermoelektrischer Effekt
-
pyroelektrischer Effekt
-
Abhängigkeit des elektrischen Widerstandes von der Temperatur
-
Abhängigkeit der Eigenleitfähigkeit von Halbleitern von der Temperatur
-
Ferroelektrizität (dem Ferromagnetismus analoges Verhalten einiger weniger Stoffe auf Grund bestimmter elektrischer Eigenschaften)
-
Abhängigkeit der Quarz‐Resonanzfrequenz von der Temperatur
Erfassung von Strahlungen
-
äußerer Fotoeffekt
-
innerer lichtelektrischer Effekt, Sperrschicht‐Fotoeffekt
-
Fotoeffekt, Compton‐Effekt (Stoß zwischen Foton und einem freien Elektron) und Paarbildung
-
Anregung zur Lumineszenz, radioaktive Strahlungen
Erfassung chemischer Größen
-
Bildung elektrochemischer Potenziale an Grenzschichten
-
Änderung der Austrittsarbeit an Phasengrenzen
-
Temperaturabhängigkeit des Paramagnetismus von Sauerstoff
-
Gasanalyse über die Bestimmung der Wärmeleitfähigkeit oder Wärmetönung
-
Wasserstoff‐Ionenleitfähigkeit von Festkörper‐Elektrolyten
-
Prinzip des Flammen‐Ionisationsdetektors
-
Hygroskopische Eigenschaften des Lithium‐Chlorids
-
Abhängigkeit der Kapazität vom Dielektrikum
Sensoren werden in den unterschiedlichsten Bereichen und Branchen eingesetzt. So müssen z. B. die in der Medizintechnik eingesetzten Sensoren anderen Forderungen und Randbedingungen genügen als die in der Fertigungstechnik benutzten. Welche Aufgaben sind nun in der Fertigungstechnik relevant?
Feststellen der Anwesenheit von Objekten
-
Vorhandensein einzelner Objekte, z. B. einer Unterlegscheibe
-
Vollständigkeitskontrolle aller Bauteile z. B. einer Montagebaugruppe
-
Detektieren von strömenden Flüssigkeiten, Gasen bzw. Mengen
-
Zählen von Objekten
Feststellung der Identität von Objekten
-
Erkennung nicht erlaubter (falscher, fehlerhafter, verdorbener) Teile im Prozess
-
Klassifizierung erlaubter Objekte, z. B. nach Toleranzklassen oder Sorten
-
Optische Zeichenprüfung und ‑erkennung, z. B. Klarschrift, Balkencodes, Matrixcodes
Erfassung von Position und/oder Orientierung von Objekten
-
Erkennung einzelner Objekte relativ zur Umgebung, z. B. zu greifende Teile auf einem Förderband, Position von Maschinenschlitten, Flächen‑ und Volumenschwerpunktbestimmung
-
Relativlage‐Erkennung von Objekten zu Werkzeugen, z. B. Schweißfuge zum Brenner
-
Lageerkennung von Objekten zu einem begrenzten Untergrund, z. B. bei der Zuschnittoptimierung (nesting), Template Matching‐Verfahren, Drehlageerkennung
-
Vermessung (Form‑ und Maßprüfung) von Objekten bezüglich Längen und Winkeln, z. B. zur Toleranzkontrolle, Verschiebung, Auslenkung, Verformung, Spiel, Schlag, Verkippung, Exzentrizität, Dicke
Erfassen der Formeigenschaften von Objekten
-
Prüfen von Konturverläufen, z. B. auf Richtigkeit von Gewinde (Steigung, Profil)
-
Prüfen von Objektregionen, z. B. auf Vorhandensein von Kanten
-
Untersuchung auf Vollzähligkeit von Formdetails, z. B. voll ausgespritztes Kunststoffteil (Sonderfall der Objekterkennung)
-
Messung von Deformationen zum Zweck der Kraft‑ und Momentenbestimmung
Aufnehmen von Oberflächenmerkmalen auf Objekten
-
Prüfen der Mikrogeometrie von Objekten, z. B. auf Rauheit, Welligkeit, Struktur
-
Prüfen auf Farbton, z. B. bei der Farbglassortierung von Glasbruch
-
Prüfen auf Homogenität der Mikrogeometrien von Objekten, z. B. auf Texturen, Beschädigungen oder Farbfehler, Topologie
Prüfen der Stoffeigenschaften von Objekten
-
Beurteilung der Transparenz von Objekten oder auch des Glanzgrades
-
Unterscheidung von Werkstoffarten, z. B. bei der Sortierung von Kunststoff‐Recycling‐Objekten auf Homogenität von Stoffen
-
Bestimmung von Konzentrationen und stofflichen Zusammensetzungen
Eine große Rolle spielen heute Sensoren in der Robotertechnik . Eine Einteilung der dort verwendeten Sensoren geht aus Abb. 1.15 hervor.

Einteilung der Sensoren für die Industrierobotertechnik
Besonders wichtig sind die taktilen (tastenden) Sensoren. Der physiologische Tastsinn beim Menschen leistet allerdings viel mehr. Der Spürsinn der Haut besitzt die Fähigkeit, Strukturen zu erkennen, die mit der Hautoberfläche in Berührung kommen. Die Druckempfindlichkeit spricht auf Kräfte und Drehmomente an. Einiges davon sollen die taktilen Sensoren (tactile sensors) ebenfalls leisten. Sie vermögen Folgendes zu erfassen (Abb. 1.16):

Einteilung der taktilen Sensoren
-
Anwesenheit von Objekten und deren Vollständigkeit
-
Form, Position und Orientierung eines Werkstücks
-
Druck an der Berührungsfläche und Druckverteilung
-
Größe, Ort und Richtung einer Kraft
-
Größe, Ebene und Wirkungssinn eines Drehmoments
Der Umfang der Sensorisierung richtet sich nach den Erfordernissen und der Art des Prozesses. In der Abb. 1.17 werden ganz grob einige Anforderungsprofile angegeben. Der auszuwählende Sensor muss nach dem Messprinzip, der Konstruktion und dem Störungsübertragungsverhalten möglichst gut zu einer bestimmten Klasse von Einsatzfällen passen.

Typische Regelgrößen, die durch die Technologie der Anwendung vorgegeben sind. Sehr langer Balken = sehr wichtig
Vor einem besonders schwierigen Problem steht der Roboter (besser sein Computer), wenn er mit einem Sichtsystem ein räumliches Objekt erkennen soll (bin picking problem). Das liegt daran, dass ein Körper aus verschiedenen Blickwinkeln völlig unterschiedliche Ansichten zeigt. Ein zylindrischer Trinkbecher kann eine Rechteck‑, Kreis‑ oder Ovalform abgeben, wobei die Form der ovalen Enden exakt vom Sichtwinkel abhängt. Für den Zugriff des Roboters auf diesen Becher müssen aus den Ansichten Greifposition und Greiferorientierung abgeleitet werden. Moderne Sichtsysteme kommen heute aber damit zurecht, weil sie nicht nur Silhouetten, sondern auch Merkmale in der Fläche in den Erkennungsvorgang mit einbeziehen.
1.4 Einsatz und Auswahl
Wenn im Rahmen einer Automatisierungsaufgabe Sensoren erforderlich werden, müssen zwei Teilaufgaben gelöst werden, Das sind:
-
Welcher Bedarf an welchen sensorischen Funktionen liegt vor?
-
Erarbeitung eines Anforderungsbildes je Sensor
Bei der Analyse der Ausgangsbedingungen kommt es auf Folgendes an:
-
Welche Unbestimmtheiten treten im Prozess auf?
-
Welche Unbestimmtheiten sind nicht tolerierbar und sollen mit dem Sensor beherrschbar werden?
-
Welche Umgebungsbedingungen (Staub, Feuchte, Temperatur u. a.) sind zu berücksichtigen?
-
Welche Zustandsgrößen sind wichtig und welcher Wertevorrat ist vorhanden?
-
Auf welche Art sollen die Informationen übertragen werden?
-
Welches physikalische Prinzip ist einsetzbar und verspricht den größten Erfolg?
-
Welche Hilfsenergie ist bereitzustellen?
Zuerst spielen die funktionellen Anforderungen die ausschlaggebende Rolle, wie z. B. Auflösung, Linearität und Ansprechzeit. Bei Distanzmessungen kann man sich an den Parametern der Tab. 1.4 orientieren [4].
Bei der Wahl des physikalischen Wirkprinzips sind der Abstand zwischen Sensor und Objekt sowie die Art des Zugriffs zu bewerten, d. h. muss das Objekt punktuell, linienförmig, flächig oder räumlich erfasst werden. Eine grobe Übersicht bietet dazu die Abb. 1.18.

Gliederung sensorischer Prinzipien nach der Art des Zugriffs. A elektronischer Endschalter, B taktile Sensoren (Kraft, Druck, Masse), C Abstandssensoren (induktiv, kapazitiv), D Reflexlichttaster, E Triangulationssensor, F Lichtschranke, G Lichtimpuls‐Laufzeitverfahren, H akustischer Abstandssensor, I tastende Sensor‐Arrays, J Sensorarrays als Druck‑/Kraftmatrix, K Mehrkomponenten‐Kraftaufnehmer, L visuelle Systeme, L1 CCD‐Linie, L2 CCD‐Zeilenkamera, L3 Mehr‐Kamerasysteme oder zweidimensionale Systeme mit Abstandssensoren, auch Stereosichtsysteme, M Sensorarray aus Sensoren mit punktförmigem Zugriff (optisch, akustisch)
Für eine Eignungsbewertung sind die technischen Kenngrößen dem Anforderungsbild gegenüber zu stellen. Das muss außerdem gewichtet geschehen, denn es gibt keinen Sensor, der alle durch die Messaufgabe geforderten Eigenschaften umfassend erfüllt. Folgende Kenngrößen können eine Rolle spielen:
-
Ansprechzeiten, Reaktions‑, Schaltgeschwindigkeit
-
Anschlusssystem (2‑, 3‑, 4‐Leitertechnik, Reihen‑, Parallelschaltung u. a.)
-
Betriebssicherheit, Ausfallrate, Zuverlässigkeit
-
Eigenüberwachungsmöglichkeit
-
Einsatztemperaturbereich
-
Einstellbarkeit von Arbeitspunkt, Empfindlichkeit und Ansprechschwelle Rückwirkungsfreiheit des physikalischen Prinzips
-
Schaltabstand, Schaltpunktdrift, Schaltpunkthysterese
-
Schutzgrad (degree of protection)
-
Spannungsversorgung (Betriebsspannung, Spannungsschwankungen und ‑spitzen)
-
Störungsunterdrückung (Unempfindlichkeit gegenüber äußeren Störgrößen wie Schwingungen, Stoß, Fremdlicht u. a.)
-
Technische Verfügbarkeit und Temperaturfestigkeit
-
Überlastungsschutz (Kurzschlussschutz, Verpolungssicherheit, Überlastfestigkeit)
-
Wirtschaftlichkeit (Aufwand/Nutzen, einschließlich der Anschaltkosten)
-
Auflösung, Messgenauigkeit
-
Korrosionsresistenz, Lebensdauer, Nutzungsdauer
-
Leistungsgrenzen, Betriebsbereich
-
Objekteigenschaften (Material, Remissionsgrad, Oberflächenmuster u. a.)
-
Realisierungsaufbau (Abmessungen, Masse, Montagebedingungen, Anpassung an Erfassungsort)
-
Redundanz der Auswerteeinheit
-
Reproduzierbarkeit des Schaltverhaltens
-
Zulassung für Spezialanwendungen (Reinraum, Explosions‑, Personenschutz u. a.)
Für den Sensoreinsatz gibt es außerdem viele spezifische Empfehlungen. So sollte man, wenn man die Wahl hat, bei optischer Erfassung Einweg‐Lichtschranken einsetzen. Sie gewährleisten bei größtmöglicher Reichweite sicheres Schalten. Als nächste Möglichkeit ist an eine Reflexlichtschranke zu denken. Sie besitzt bei etwa halber Reichweite ebenfalls einen sicheren Schaltpunkt für die meisten Materialien. Bei hochglänzenden Objekten können Lichtschranken versagen. Zur Erhöhung der Störsicherheit werden dann Geräte eingesetzt, bei denen das Licht polarisiert wird. Da bei Lichtschranken der Empfänger das Licht sieht, wenn kein Werkstück vorhanden ist, und das Signal abfällt, wenn ein Werkstück erfasst wird, überprüft sich dieser Sensor selbst. Das Signal fällt auch ab, wenn der Sender keinen Lichtstrahl mehr abgibt.
Reflexionslichttaster kommen dort zum Einsatz, wo man Objekte nur von einer Seite aus abfragen kann. Transparente Objekte lassen sich mit diesem Sensor ebenfalls detektieren, mattschwarze Teile ziemlich schlecht. Sehr kleine Objekte kann man mit Lichtleitern optoelektronisch erfassen. Objektkanten verfolgt man bei größeren Entfernungen besser mit Laserstrahl‐Reflexionslichtschranken.
Bei kapazitiven Sensoren muss der Bereich der aktiven Zone von Metallen und Stoffen mit hoher Permittivitätszahl frei gehalten werden. Beim Einsatz mehrerer Sensoren, die sich gegenseitig beeinflussen, sind Mindestabstände vorgeschrieben. Staubablagerungen können zu Fehlfunktionen führen. Bei solchen Umgebungsbedingungen setzt man kapazitive Sensoren mit zusätzlicher Kompensationselektrode ein.
Induktive und kapazitive Sensoren sind gegenüber intensiver Röntgenstrahlung und starken Magnetfeldern nicht immun. Letztere treten z. B. an Arbeitsplätzen für das Widerstandsschweißen auf. Man wählt dann schweißstromfeste Sensoren aus. Beim Einbau induktiver Sensoren ist die Einbauumgebung zu beachten. Wenn der Sensor bündig zur Oberfläche eines Maschinenbauteils eingebaut werden soll, kann eine Freisparung des umgebenden Werkstoffs notwendig werden. Man sollte übrigens immer Sensoren mit LED‐Anzeige verwenden, um den Betriebszustand des Sensors beobachten zu können.
Reed‐Kontaktschalter als Signalgeber an Pneumatikzylindern sind zwar um ein Vielfaches der Erdbeschleunigung schockbeständig, sollten aber trotzdem vor Schlägen geschützt werden. In starken magnetischen Feldern kann es auch bei diesen Sensoren zu Fehlschaltungen kommen. Es gibt ebenfalls Mindestabstände zum nächsten Pneumatikzylinder, die man einhalten muss. Anstelle der Reed‐Schalter können auch kontaktlose magnetisch‐induktiv arbeitende Näherungsschalter eingesetzt werden, die etwas teurer sind, aber störungsunempfindlicher und genauer arbeiten.
Viele Sensoren sind übrigens nicht geeignet, um Elektromagnete von z. B. Pneumatik‐Wegeventilen direkt zu schalten. Bei einer nichtelektronischen Steuerung sollte man über Hilfsrelais gehen oder eine geeignete Schutzbeschaltung vorsehen.
Druckschalter können durch innere Reibungswiderstände (Feder) eine Hysterese im Schaltpunkt aufweisen. Bei steigendem Druck, wenn der Einstellpunkt erreicht ist, folgt das elektrische Signal. Bei fallendem Druck schaltet der Sensor nicht am gleichen Punkt. Einschaltpunkt ist nicht gleich Ausschaltpunkt. Dieses Verhalten ist bei der Einstellung eines Druckschalters zu beachten, abhängig davon, ob bei steigendem Druck geschaltet werden muss oder nicht.
Beim Einsatz relativ nahe beieinander angebrachter Ultraschallsensoren kann ein vom Sensor A verursachtes Echo auch von Sensor B empfangen werden. Das wäre eine Fehlmessung. Durch Gleichschaltung (Synchronisation) aller Sensoren kann man die gegenseitige Beeinflussung ausschließen. Alle Sensoren senden gleichzeitig. Wenn nun der Weg des Schalls vom Sensor A zum Sensor B größer ist als die maximale Erfassungsdistanz, treten keine Probleme auf. Eine andere Betriebsart wäre der Multiplexbetrieb, bei der die Sensoren nacheinander aktiviert werden und sich ebenfalls nicht gegenseitig stören.
In welchen Schritten werden Sensoren ausgewählt?
-
1.
Wahl eines geeigneten physikalischen Wirkprinzips
-
2.
Bestimmung des benötigten Messbereiches
-
3.
Festlegung der zu erwartenden Messgrößenänderung
-
4.
Feinheit der Auflösung des Messsignals
-
5.
Bestimmung des kleinsten zu messenden Wertes
-
6.
Zulässiger Fehler als Auswirkung des statischen und dynamischen Verhaltens
-
7.
Aufwand für Abschirmmaßnahmen (elektromagnetische Verträglichkeit)
-
8.
Aufwand für Verstärkung und Auswertung des Messsignals
-
9.
Bewertung von Betriebssicherheit, Zuverlässigkeit, Lebensdauer und Wartungsaufwand
-
10.
Untersuchung der An‑ und Einbaubedingungen
-
11.
Möglichkeiten zum Anschluss an Feldbussysteme
-
12.
Kosten für Beschaffung, Installation und Test
Welche Sensoren werden am häufigsten eingesetzt?
Aus einer wertmäßigen Betrachtung des Weltmarktes ergibt sich etwa folgende Rangfolge für die Sensorarten (Quelle: Intechno Consulting, 1998):
-
Temperatursensoren
-
Drucksensoren
-
Durchflussensoren
-
Binäre Positionssensoren
-
Positionssensoren
-
Flüssigkeits‐Chemosensoren
-
Füllstandssensoren
-
Geschwindigkeitssensoren
-
Gas‐Chemosensoren
Der zivile Weltmarkt für Sensoren wurde für das Jahr 2000 auf mehr als 30 Mrd. Euro geschätzt. Er hat sich bis zum Jahr 2010 etwa verdoppelt.
Zur weiteren Vertiefung und zum Nachschlagen findet der interessierte Leser in der Literatur [5,6,7,8,9,10,11,12,13,14,15,16] umfangreiche Darstellungen zur Sensorik.
Sensoren, die ohne berührenden Kontakt Informationen über ein Objekt oder zur Umgebung erfassen und auswerten, werden auch als approximative Sensoren bezeichnet. Ihre Wirkung beruht auf der Ankopplung von Feldern, Wellen und Teilchenströmen an Objekte des Erfassungsraumes. In der Abb. 1.19 werden die Tastabstände je nach physikalischem Wirkprinzip dargestellt. Die Funktion basiert auf der Abhängigkeit des vom Sende- zum Empfangswandler gelangenden Energie- bzw. Stoffanteils auf geometrische Verhältnisse, auf Material-, Form- oder Oberflächeneigenschaften und auf die Zeitdauer bei integrierend arbeitender Signalgewinnung. Zu den Approximationssensoren gehören z.B. Magnet-, Ultraschall- und Mikrowellensensoren.

Tastabstände approximativer Sensoren

Literatur
Schnell, G. (Hrsg.). (1993). Sensoren in der Automatisierungstechnik. Braunschweig Wiesbaden: Vieweg Verlag.
Ahlers, H. (Hrsg.). (1997). Multisensorikpraxis. Berlin Heidelberg: Springer Verlag.
Fürst, K., Zeichen, G. (2000). Automatisierte Industrieprozesse. Berlin Heidelberg: Springer Verlag.
Simmoleit, R. (2003). Mit Abstand – messbar besser. Elektro Automation, 4, 134.
Adam, W., Busch, M., & Nikolay, B. (2011). Sensoren für die Produktionstechnik. Berlin Heidelberg: Springer Verlag.
Eißler, W., & Knappmann, R.-J. (1989). Praktischer Einsatz von berührungslos arbeitenden Sensoren. Ehningen: Expert verlag.
Gevatter, H.-J. (Hrsg.). (2000). Automatisierungstechnik 1 – Mess‑ und Sensortechnik. Berlin Heidelberg: VDI‐ Springer Verlag.
Hering, E., & Schönfelder, G. (2012). Sensoren in Wissenschaft und Technik. Wiesbaden: Vieweg+Teubner Verlag.
Juckenack, D. (1990). Handbuch der Sensortechnik. Landsberg: Verlag Moderne Industrie.
Niebuhr, J., & Lindner, G. (2008). Physikalische Messtechnik mit Sensoren. München Wien: Oldenburg Verlag.
Profos, P., & Pfeifer, T. (1997). Grundlagen der Messtechnik. München Wien: Oldenburg Verlag.
Schanz, W. G. (2004). Sensoren – Fühler der Messtechnik. Heidelberg: Hüthig Verlag.
Schoppnies, E. (Hrsg.). (1992). Lexikon der Sensortechnik. Berlin Offenbach: vdi Verlag.
Schrüfer, E. (2007). Elektrische Messtechnik. Leipzig: Hanser Fachbuchverlag.
Tränkler, H.-R., & Obermeier, E. (1998). Sensortechnik – Handbuch für Praxis und Wissenschaft. Berlin Heidelberg: Springer Verlag.
Wirsum, S. (2000). Das Sensor‐Kochbuch. Bonn: MITP‐Verlag.
Author information
Authors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Fachmedien Wiesbaden GmbH, ein Teil von Springer Nature
About this chapter

Cite this chapter
Hesse, S., Schnell, G. (2018). Sensoren – Sinnesorgane der Technik. In: Sensoren für die Prozess- und Fabrikautomation. Springer Vieweg, Wiesbaden. https://doi.org/10.1007/978-3-658-21173-8_1
Download citation
DOI: https://doi.org/10.1007/978-3-658-21173-8_1
Published:
Publisher Name: Springer Vieweg, Wiesbaden
Print ISBN: 978-3-658-21172-1
Online ISBN: 978-3-658-21173-8
eBook Packages: Computer Science and Engineering (German Language)