同步电机转速环PI参数计算?
1 个回答

注:本文讲的正是转速环pi计算,内容可作为参考。
上周讲了电流环PI参数的自动整定,获得了很多读者的点赞和喜欢,本想亲自去实践一下计算出来得到的电流环PI参数,但在TI的文档中计算电流环带宽的方法其中一种是设置为采样频率的1/20,另一种是通过速度环的带宽来计算。因此,为了彻底理解电流环路参数的的计算, 还是先把速度环的PI参数整定先理解透彻后,再进行整体的实践吧。
如果对电流环参数整定忘了的话,可以点击以下文章,稍微复习下整定的方法。
坐好了,我要再次发车了。
速度环的拓扑结构如下图1所示:
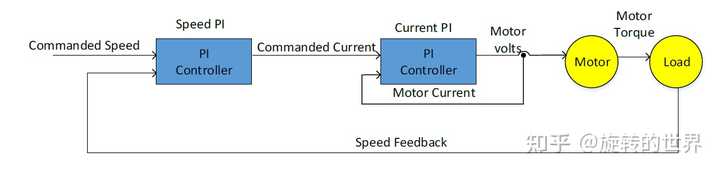

要推导出速度环系统的闭环传递函数,首先需要知道系统中各个模块的传递函数。 首先由上一篇文章中知道电流环的闭环传递函数为:
G(s) =\frac{1}{1+\frac{L}{Ka}s}
其中Ka是电流环的参数,L是电机的电感。
在速度环PI中用 spdK_{a} , spdK_{b} 表示PI的参数。速度环的开环传递仍然使用串联结构,可以推导为:
PI_{speed}(s) =\frac{spdKa *spdKb* (1+\frac{s}{spdK_{b}})}{s}
电流和力矩的关系为:
T_{e}(t) =\frac{3}{2}\frac{P}{2}\lambda_{r}i(t)
其中 T_{e} 是电机输出转矩, \lambda_{r} 是转子磁通量。电流是输入变量,转矩是输出变量,所以传递函数为:
\frac{T_{e}(t)}{i(t)} =\frac{3}{2}\frac{P}{2}\lambda_{r} =\frac{3}{4}P\lambda_{r}
转矩和速度的关系式是:
T_{e}(t) =J\frac{d\omega(t)}{dt}
其中 \omega(t) 是电机转速, J 是电机的转动惯量;
对上式进行Laplace 变换:
T_{e}(s) =Js\omega(s) ,
T_{e} 是输入变量, \omega 是输出变量;
所以传递函数为:
\frac{\omega(s)}{T_{e}(s)} =\frac{1}{Js}
求出各个模块的传递函数之后,将其相乘得到速度调节系统的开环传递函数:
GH(s)=\frac{spdKa *spdKb* (1+\frac{s}{spdK_{b}})}{s} * \frac{1} {1+\frac{L}{Ka}s} * \frac{3}{4}P\lambda_{r} * \frac{1}{Js}
将上述公式中的参数组合成一个常量K
K= \frac{3P\lambda_{r}}{4J}
于是速度环的开环传递函数可以简化成:
GH(s)=\frac{K*spdKa *spdKb* (1+\frac{s}{spdK_{b}})}{s^{2}(1+\frac{L}{Ka}s)}
通过观察上面公式可以发现速度调节系统开环传递函数有这么几个部分组成,并有以下特点:
- 二阶的积分环节,在S=0时有两个极点,导致每十倍频率以40dB的低频衰减,相位滞后180度
- 一阶的惯性环节,在S= \frac{Ka}{L} 有一个极点,导致高频部分每十倍频率以20dB的低频衰减,相位滞后从0度90度
- 一阶微分环节,在S= spdK_{b} 有一个零点,导致以每十倍频率以20dB增加,相位超前从0度到90度:
为了使系统运行稳定,假设极点频率S= \frac{Ka}{L}要大于零点频率S= spdK_{b},至于为什么这样假设,此处按下不表,且待后文详说
将上面三个组成部分合成后画成Bode图就可以得到图2:


注:下面部分的描述逻辑顺序和TI文档中的略有不同,因为我发现TI的文档陈述逻辑理解起来并不是很容易,所以做了调整
为什么这个曲线如此重要呢?这是因为在0dB的频率的相移决定了系统的稳定性。参照《自动控制原理》教材图3中对相位裕度的描述, \omega_{c} 频率对应的点为0db位置,它对应的相频特性曲线中偏离-180度的相角量,就称为相位裕度 \gamma 。这个值越大,代表系统越稳定。


定义为阻尼因子 \delta , 用该值来表示0db位置的频率 \omega_{0db} 和零点频率 \omega_{zero} 和极点频率 \omega_{pole} 的关系。
\omega_{0db} =\delta\omega_{zero} (对照图2,可以理解为0db位置频率值是零点频率 \omega_{zero} 的 \delta 倍)
\omega_{pole} =\delta\omega_{0db} (对照图2,可以理解为极点频率值 \omega_{pole} 是0db位置频率 的 \delta 倍)
\omega_{pole} =\delta^{2} \omega_{zero} (对照图2,可以理解为极点频率值 \omega_{pole} 是零点频率 \omega_{zero} 的 \delta^{2} 倍)
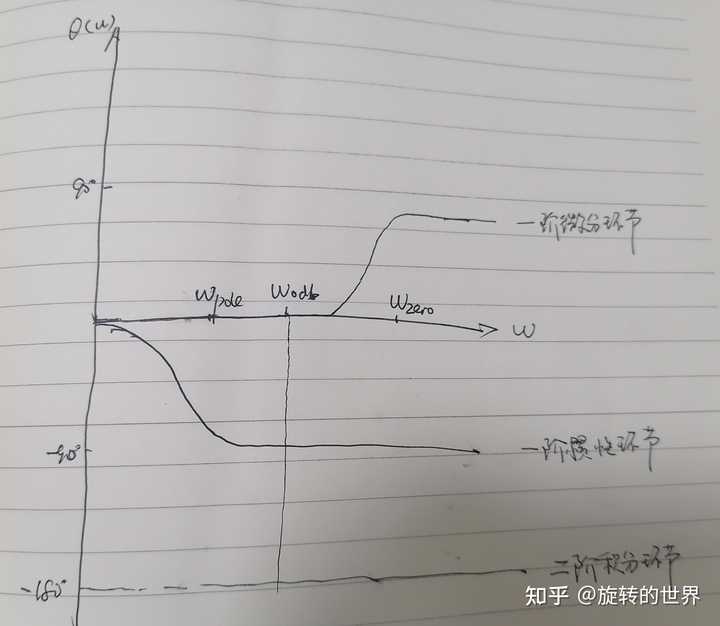
如果果 \delta<1,那么 \omega_{pole} <\omega_{0db}<\omega_{zero} ,可以分别画出以上三个部分的的相频特性曲线图,如下图4(手画,只是示意)所示,那么合成后的相位裕度 \gamma 肯定是小于0的,系统必然不稳定;这就解释了前面的假设

如果 \delta=1 ,那么0db频率和极点频率和零点频率相等,这导致极点/零点消除,相位裕度 \gamma 等于0,系统将不稳定。
从理论上讲, \delta>1 的任何值都是稳定的,因为相位裕度 \gamma 大于 0。 但是 \delta 值接近1会导致严重欠阻尼性能,\delta 值越大,0db频率和极点频率和零点频率就越远。它们越远,相位裕度就会在这些频率之间达到峰值,这以牺牲速度环带宽为代价提高了稳定性,bode图如下图5所示。


极点频率 \omega_{pole} = \frac{K_{a}}{L}, 零点频率 \omega_{zero} =spdK_{b} ,两者之间就可以通过阻尼因子联系起来,表示为:
spdK_{b} =\frac{K_{a}}{L\delta^{2}}
至此速度环的 spdK_{b} 参数已经求出,它是和阻尼因子 \delta 有关系的一个量。那spdK_{a} 怎么求呢?
上式的开环传递函数中:
GH(s)=\frac{K*spdKa *spdKb* (1+\frac{s}{spdK_{b}})}{s^{2}(1+\frac{L}{Ka}s)}
当 \omega_{0db} 时, GH(s)= 1 。将s 用0db的频率 \delta spdK_{b} 代入, spdK_{b} 用 \frac{K_{a}}{L\delta^{2}} 代入,即可求出 spdK_{a}
spdK_{a} =\frac{\delta spdK_{b}}{K}
到此速度环的参数全部求出。
总结:
在设计速度环参数时引入阻尼因子 \delta ,只需调节这个参数就可以设定速度环参数,这个参数是稳定性和带宽的折中。
spdK_{b} =\frac{K_{a}}{L\delta^{2}}
spdK_{a} =\frac{\delta spdK_{b}}{K}
至于怎么调节这个阻尼因子系数,还有更多的学问,作者也需要时间通过实践来印证这两篇电流环和速度环参数自动整定的理论分析。
欲知后事如何, 请听下回分解~~~
参考文献:TI《TMS320F2802xF InstaSPIN™-FOC》Chapter 12 Tuning Regulators