
Abstract
Intense field dielectrics (IFD) are widely used in the air purification industry. DC power supplies must be designed to provide a high voltage for IFD products. Therefore, this paper introduces a compact 10 kV high-voltage DC power supply tailored for IFD air purification. It employees a novel controller, which is a fusion of a fixed-frequency PWM-based sliding-mode controller and a phase-shift full-bridge configuration. The superiority of the proposed DC power supply topology is demonstrated. Rigorous simulation analysis employing MATLAB/Simulink shows that the robustness and stability of the new controller are much better than fixed-frequency PWM-based sliding-mode controllers. Subsequently, a high-voltage DC power prototype is fabricated, followed by comprehensive experimental validation. Test results underscore the stability of the DC power supply under normal operating conditions. Notably, when the controller adopts a linear PI configuration, the DC voltage output ripple is contained within a stringent threshold of ≤ 0.4%. Moreover, in the presence of AC power system oscillations, the novel controller showcases its ability to achieve a heightened response speed, which contributes to the robustness of the DC power supply.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Due to the escalation haze pollution and the persistent evolution of viral strains, the imperative to advance intense field dielectric (IFD) for adsorbing micro-scale airborne particles including haze and pathogens has become evident [1, 2]. Consequently, the urgent need to develop a high-efficiency, compact high-voltage DC power supply to align with the operation of IFD has emerged [3,4,5,6,7].
In response to the intricate signal variations in power supply operational scenarios, researchers have put forth a diverse array of nonlinear control methodologies aimed at enhancing the robustness of power supply systems. Scholars such as Cohen et al. have advocated for the utilization of a fuzzy controller [8,9,10]. This approach serves to mitigate the impact of nonlinear alterations in system inputs, which bolsters system robustness. However, it is worth noting that the implementation of fuzzy controllers often comes with the drawback of substantial voltage output fluctuations that are challenging to rectify. Leon et al. embraced the sliding-mode (SM) controller to effectuate closed-loop control within power supply systems [11,12,13]. The benefits of the SM controller reside in its independence from system parameters and external disturbances, which confers heightened robustness to the power supply. Nonetheless, the efficiency of this type of controller is tempered by the persistence of significant output voltage fluctuations. These fluctuations, coupled with oscillatory perturbations, have the potential to engender system instability. To ameliorate voltage ripple, the introduction of a compensation module is warranted. However, the outcomes of this approach are not consistently satisfactory. A novel hybrid control methodology was proposed by Attar et al. This hybrid approach entails the utilization of PI control during steady-state conditions, seamless transitioning to SM control when nonlinear shifts manifest and further transitioning to fuzzy control when required [14,15,16]. This dynamic orchestration substantially reduces output voltage ripple and enhances system robustness. Notably, the implementation of SM control is governed by a hysteresis loop comparator. The hysteresis loop modulation of the SM control, characterized by an inconsistent switching frequency, engenders a series of challenges including amplified switching losses and escalated electromagnetic interference (EMI) noise. None of the previously mentioned power control methodologies encompasses the integration of the soft-switching technique. Approaches that specifically address the achievement of lossless conduction are presented in [17, 18]. Among the prevailing implementations of soft-switching techniques, the phase-shift full-bridge (PSFB) control method stands as the most prevalent approach [19,20,21]. In the investigation conducted by Akso et al., the utilization of an SM controller was extended to govern the phase-shift angle of the inverter [22, 23]. This controller amalgamates the benefits of nonlinear control strategies while simultaneously achieving soft switching. As a result, the losses incurred by the switching devices are notably decreased. However, it is pertinent to acknowledge that despite this advancement, the SM controller remains reliant on hysteresis loop modulation, which retains the drawback of output jitter.
Simultaneously, to achieve the miniaturization objective for the high-voltage DC power supply, this investigation puts forth an innovative approach to reduce the dimensions of the high-frequency transformer through the incorporation of a voltage-doubling circuit. The voltage-doubling circuit, as demonstrated by Mao et al., adopts a Cockcroft–Walton (CW) circuit. However, it is worth noting that due to the frequent charging and discharging cycles of capacitors, a significant voltage drop ensues, which contributes to unstable power supply operations [24, 25]. To address this problem, this work introduces a novel positive/negative bidirectional voltage-doubling circuit topology [26]. Consequently, this paper introduces a novel controller that integrates a fixed-frequency PWM-based sliding-mode (PWM-SM) controller with the PSFB topology (SM-PSFB). The high-voltage DC power supply topology is then subjected to simulation and comparative analysis through MATLAB/Simulink. The simulations encompass both the PWM-SM controller and the SM-PSFB controller. Finally, to validate the viability of the theoretical constructs, a prototype of the high-voltage DC power supply is fabricated, and experimental test results show a good consistency with the simulation results.
2 High-voltage DC power supply circuit
2.1 Circuit topology design
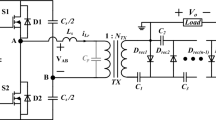
The proposed power supply topology is illustrated in Fig. 1. It comprises four parts: a rectifier-buck module, a 24 V protective-boost module, a high-frequency inverter module, and a voltage-doubling circuit composed of a high-frequency boost module. The rectifier-buck module adopts an uncontrolled circuit configuration, consisting of four rectifier diodes (D1–D4) and a voltage-supporting capacitor (C5), to convert AC 220 V into DC 311 V. Subsequently, the rectified voltage DC 311 V and the DC 24 V protective power supply are segregated into Buck (consisting of Q5, D6, L2, and C6) and Boost (consisting of Q6, D5, L3, and C7) circuits, respectively.

Topology of the proposed high-voltage DC power supply
In this power supply, the voltage of the 24 V power supply and the voltage of the 311 V power supply are not on at the same time. Thus, their voltages do not need to be exactly the same. The working principle of the circuit is given as follows. Under normal operation, the power supply is powered by 311 V, and there is no trigger signal for Q6 and Q7. Thus, the circuit of the 24 V power supply does not participate in the work. When DSP detects that power loss has occurred, Q5 blocks, at this time Q7 on, Q6 as the MOSFET of the boost circuit to participate in power supply work.
This design results in a uniform effective value, designated as UC6, to reduce the transformer size. Notably, the capacitance and inductance calculation formulas for the L3 and C7 of the Boost circuit, as well as the L2 and C6 of the Buck circuit, are shown as follows:
where DBoost, TBoost, IBoost, and ΔUBoost represent the duty cycle, period, frequency, ripple current, and ripple voltage of the boost circuit, respectively. Similarly, DBuck, TBuck, ΔIBuck, and ΔUBuck represent the duty cycle, period, ripple current, and ripple voltage of the buck circuit, respectively.
The high-frequency inverter module employs the H-bridge topology incorporating four MOSFET switching tubes (Q1–Q4). This facilitates the conversion of UC6 into a high-frequency AC voltage. Subsequently, this high-frequency AC voltage is connected to the primary side of the high-frequency transformer T. As a result, the output voltage of the secondary side of the high-frequency transformer T is 834 V. It is noteworthy that the operational frequency of the high-frequency transformer is commonly greater than 20 kHz [27].
The high-frequency inverter module is designed to incorporate a voltage-doubling circuit that is applied to amplify the AC voltage emanating from the secondary side of the high-frequency transformer while maintaining isolation from the primary side. This arrangement results in an output voltage of 10 kV coupled with 10 W of output power. The voltage-doubling circuit is structured with a positive voltage-doubling topology that is composed of capacitors C8–C13 and diodes D7–D12, as well as a negative voltage-doubling topology that is constructed with capacitors C14–C19 and diodes D13–D18. Once the output voltage from the transformer is completely transferred to the capacitors, the electrical energy is supplied to the load through the elevated capacitor voltage, substantiating the energy demand of the load [28].
Table 1 illustrates the electrical parameters for the high-voltage DC power supply.
2.2 Calculation and analysis of the voltage-doubling circuit
The voltage-doubling circuit employs a bidirectional rectifier topology. In this design, the capacitance values of C8–C19 remain uniform. The charges accumulated on the capacitor C15 are represented as Q. Subsequently, the charge on the capacitors C17, C19, C13, C11, and C9 have an increment with Q. As a result, the ripple voltage ΔUC15, as well as the overall ripple voltage ΔUCΣ, can be determined using the following empirical formulas:
where D is the duty cycle; C0 is the capacitor value of the voltage-doubling circuit, uF; I0 is the current flowing through the capacitor in A; and f is the switching frequency in Hz. It can be approximated as an equivalent voltage-doubling circuit resembling the configuration illustrated in Fig. 4. In this context, the ripple voltage on the equivalent capacitor (Ce) can be determined as follows:
The current flowing through the equivalent capacitance Ce, can be determined. It is observed that Eqs. (6) and (7) are equivalent. As a result, the equivalent capacitance Ce can be expressed as
Figure 2 shows simulation results of the voltage across the capacitors C8–C19 and the current flowing through the diodes D7–D18. Simulation results illustrate that the capacitors, except for C8 and C14, experience a voltage that is twice that of the input voltage under normal operation of the DC power supply, which amounts to approximately 1670 V. The charging and discharging sequence of capacitors achieves a 180° phase crossover. This characteristic ensures that the ripples of the output voltage do not overlap within a period, resulting in a significant reduction in the output voltage ripples. It is worth noting that this topology concurrently decreases the internal voltage drop and dynamic response time in contrast to traditional CW voltage-doubling circuits.

Capacitor voltage and diode current waveforms of the voltage-doubling circuit: a VC9–VC13, ID7–ID12; b VC15–VC19, ID13–ID18
2.3 Operation mode and control principle
Furthermore, for the circuit operation analysis, all the electrical components are treated as ideal. Waveforms of the Q1–Q4 drive signals, the main loop current IL1, and the output voltage VAB are displayed in Fig. 3. This representation makes it possible to see that the DC power supply encompasses eight operation modes within a single switching cycle. The equivalent circuit for each of the operation modes in a half-positive cycle is depicted in Fig. 4.

SM-PSFB ZVS waveforms

Equivalent circuits of the modes for the positive half period: a 0 ~ t0; b t0–t1; c t1–t2; d t2–t3
-
1.
0 ~ t0: As illustrated in Fig. 4a, both Q1 and Q4 are in a conduction state. The current follows the path of Q1–L1–T–Q4. Notably, the current direction aligns with the reference direction.
-
2.
t0–t1: Depicted in Fig. 4b, at the moment t0, Q1 is deactivated. The clamping effect of C1 enables a zero-voltage soft shutdown of Q1. In this stage, the DC charges through C1 and discharges through C3, subsequently passing through L1, T, and Q4. The current begins decreasing until it reaches zero.
-
3.
t1–t2: As depicted in Fig. 4c, Q3 shows a conducting state. The clamping effect of C3 facilitates zero-voltage conduction for Q3. When Q2 is conducted, the DC power supply operates in the DCM (discontinuous conduction mode) due to its low output power. During this stage, the capacitor in the voltage-doubling circuit retains the stored energy. Consequently, energy transfer from the primary to the secondary side of the transformer is inhibited. As a result, the output voltage u0 is provided by the equivalent capacitance of the voltage-doubling circuit.
-
4.
t2–t3: As illustrated in Fig. 4d, the energy within the voltage-doubling circuit experiences depletion. The primary side of the transformer initiates the energy to the load via the Q2–T–L1–Q3 path. At the moment t3, the circuit embarks on another half-cycle. The intricacies of this subsequent half-cycle are analogous to the above half-cycle.
3 DC power supply design of the SM-PSFB controller
3.1 Fixed-frequency PWM-based SM controller
In contrast to the traditional SM controller, the fixed-frequency PWM-based SM controller represents an indirect approach to the SM controller. The design of the new SM controller of the power supply involves selecting state variables that encompass the output voltage error x1, the output voltage error x2, and the integral of the output voltage error x3. Like the third-order PID, the new SM controller includes an additional integral term x3. This supplementary term contributes to mitigating the steady-state error of the system to a certain degree [29]. The expressions for the state variable x and the SM function S(x) can be articulated as follows:
where Vref represents the reference voltage of the DC power supply in V; u0 and uab denote the output voltage of the power supply and the output voltage of the high-frequency inverter in V; K signifies the coefficient of the voltage sampling; N corresponds to the ratio characterizing the primary and secondary windings of the high-frequency transformer; and k1, k2, and k3 are coefficients associated with the three inputs within the SM function.
The derivatives for each of the state variables can be ascertained as follows: \(x^{\prime}_{{1}}\) = x2 and \(x^{\prime}_{{3}}\) = x1. By organizing Eq. (9), the expressions for the derivatives of the state variables can be obtained:
where R' and C' denote the equivalent resistance (R) and capacitance (Ce) loads of the IFD, which are transformed to equivalent values on the primary side of the high-frequency transformer:
Based on Eq. (10), the formula for the derivative of the SM surface can be represented as follows:
Ideally, the system satisfies S′(x) = 0 when it traverses the SM surface. This condition ensures that the system approaches the SM surface. When it concludes the approach phase, it can directly navigate along the SM surface towards the equilibrium point. Consequently, the system ceases to exhibit high-frequency, minor-amplitude oscillations close to the SM surface. S′(x) was simplified and obtained from S′(x) = 0:
Here, m is a discrete parameter representing the switching state of the MOSFET Q1, which is defined by the following expressions:
\(i^{\prime}_{{\text{c}}}\) corresponds to the equivalent current passing through C' after accounting for the discount factor, A. Further simplification of Eq. (14) leads to
Utilizing the principle of PWM, it can be inferred that m can be equated to the duty cycle of the switching tube:
Here, mr signifies the voltage value of the modulating waveform, V. Meanwhile, mtri denotes the amplitude of the carrier waveform, V. Assuming that mtri = KNu0, the expression for the modulating waveform mr can be derived as follows:
Assuming the feedthrough coefficient of the sampling capacitor is kx and the error coefficient of the sampling voltage is ky, then
Thus, the simplified expression for mr is
It becomes evident that when S(x) assumes a value greater than zero (i.e., m = 1), the derivative S′(x) in Eq. (14) must be negative. Conversely, when S(x) is less than zero (i.e., m = 0), S′(x) in Eq. (14) must be positive to ensure the effective operation of the designed SM controller. Consolidating the abovementioned conditions yields
By simplifying the above equations, it becomes evident that 0 < mr < mtri, which allows the control system to establish a pulse width modulation (PWM) signal. Furthermore, if the parameters of the DC power supply system can satisfy this equation at any moment, it is ensured that the derivative of the switching function S′(x) = 0. This, in turn, indicates that the system bypasses the arrival phase and immediately enters the SM initiation.
Simultaneously, upon determining the values of kx and ky, and when S(x) = 0, x2 and x3 are converted to x1, which enables the SM surface to be viewed as a second-order differential equation:
Comparing the aforementioned equation with the standard format of a second-order differential equation leads to
where ζ is the relative damping coefficient (damping ratio), and ωn is the undamped oscillation frequency (natural frequency). Typically, when configuring the parameters kx and ky in Eq. (21), it is primarily the damping ratio that needs consideration in the underdamped condition.
3.2 SM-PSFB controller
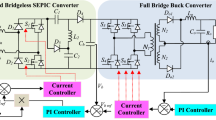
To enhance the stability and robustness of the DC power system during the implementation of the soft-switching technique, a linear phase-shift PI controller is introduced into the PWM modulation waveform, which is generated through the SM controller in accordance with the PWM modulation technique. Consequently, a Hammerstein model [30] can be constructed by analyzing the step transient response of the system. This method aids in deducing the transfer function of the system.
Figure 5 presents a control block diagram of the DC power supply system, which prominently features a novel type of SM-PSFB controller. Notably, this DC power supply adopts the concept of an SM controller, combined with PWM modulation, to generate the PWM modulation waveform that governs the switching dynamics of the MOSFETs. Concurrently, the operation of the switching device is smoothly executed through a PSFB equipped with a single closed-loop voltage PI controller.

Control block diagram
Here, X, Ka, and Kb are the DC voltage sampling circuit coefficients, the DC current sampling circuit coefficients, and the coefficients of the difference between the sampled voltage and the reference voltage, respectively. U0 is the actual output voltage.
Once the DC power supply topology is established by MATLAB/Simulink, it can be treated as a traditional black-box model. The input–output relationships of the topology and the step transient response can be obtained. Subsequently, the discrete data are subjected to analysis by the least square method. To simplify the calculation, the input point is placed at the front end of the inverter, and the output point is placed at the output end of the 10 kV DC voltage. By approximating the Tustin transformation, the closed-loop transfer function A(s) of the system can be acquired.
Figure 6 shows a Bode plot of the closed-loop transfer function of the SM-PSFB controller. The crossover frequency (ωc) is approximately 50 kHz. The gain (Gm) is measured at 23 dB, and the phase (Pm) is measured at 69.8°. These values indicate a favorable degree of stability of the system.

Bode plot of A(s)
3.3 Comparison of simulation results
Based on the inherent load attributes of the IFD, alterations in the load are unlikely to manifest abruptly. In the event of an AC power source disruption, a fast transition to a 24 V DC power source becomes imperative. Figures 7 and 8 show MATLAB/Simulink simulation diagrams when the power input is AC to DC and when the AC input disturbance drops of 15%, respectively. In these figures, the two control methods are used to control the DC power supply. The two control methods are the SM-PSFB controller and the PWM-SM controller. The time of the fluctuation is set to be 0.25 s after a steady state is reached.

Output voltage of a high-voltage DC power supply (input AC to DC): a SM-PSFB; b PWM-SM

Output voltage of a high-voltage DC supply (AC input disturbance drops by 15%): a SM-PSFB; b PWM-SM
Based on the analysis of the simulation results presented in Fig. 7, a number of conclusions can be drawn. When the SM-PSFB controller is applied to manage the power supply after an AC power disruption, the rectifier-buck circuit deactivates, triggering the operation of the protective-boost circuit. As a result, the output of the power supply swiftly regains its stability at DC 10 kV within 0.5 ms, experiencing a voltage reduction of 49.2 V. Conversely, when the PWM-SM controller is employed, the process of restoring the steady-state conditions necessitates 3.6 ms and leads to a voltage drop of 51.2 V. By comparing the simulation results, it becomes evident that the robustness of the power supply is more pronounced with the implementation of the SM-PSFB controller as opposed to the PWM-SM controller, particularly when transitioning between power supply source inputs.
Based on the analysis of the simulation outcomes presented in Fig. 8, several observations can be made. First, during a stable operation state, the utilization of the innovative SM-PSFB controller results in a ripple voltage of 0.5 V. This value is notably lower than that of the PWM-SM controller, where the ripple voltage after adopting the PWM-SM controller measures 1.2 V. Second, when subjected to an input voltage that decreases by 15% of the rated value, the performance diverges between the two controllers. Employing the SM-PSFB controller facilitates a swift restoration to the steady state within 4 ms. In addition, the voltage experiences a decline of 2.3 V. Conversely, the application of the PWM-SM controller necessitates a more extended interval of 8 ms to re-establish the steady state. Notably, the voltage output surpasses that of the AC power supply by 4 V upon steadying. In addition, the voltage incurs a notable drop of 28 V. From these findings, it is evident that the SM-PSFB controller excels in terms of both robustness and stability in the face of input voltage fluctuations. It can also be seen that it outperforms the PWM-SM control strategy.
4 Experimental results
Figure 9 illustrates a prototype of the high-voltage DC power supply. Noteworthy components include the primary circuit board, the TMS320F28335 as the principal controller chip, an auxiliary power supply, a DC power supply characterized by its protective design, and the equivalent load resistor of an IFD. The main parameters for the DC power supply are itemized in Table 2.

High-voltage DC supply prototype
To curtail system overshooting and to facilitate operation within the realm of critical damping, computations can be performed to determine the values of kx and ky as depicted in Eqs. (19, 20, and 25). These calculations yield kx = 0.0783 and ky = 0.0128.
Figure 10 presents multiple waveforms. The DC power supply output voltage is shown in Fig. 10a, overdriven signals of Q1 and Q3 are shown in Fig. 10b, and output voltage waveforms of the high-frequency inverter are shown in Fig. 10c.

DC power supply waveforms: a output voltage of the DC line; b trigger signal of Q1 and Q3; c inverter output voltage
Once the prototype is operating at its rated power, Fig. 10a depicts that the application of the SM-PSFB controller yields an enhanced stability in the output voltage of the DC power supply. This is evident from the minimal output voltage of 9961.6 V, the maximal output voltage of 10,018.2 V, and a mere 0.39% output voltage ripple. In Fig. 10b, it is apparent that the switching period of the controller remains constant under rated power conditions. Furthermore, the duty cycle undergoes changes, adjusting the size of the phase-shift angle to stabilize the output voltage. Consequently, it can be inferred that the DC power supply attains voltage regulation through the implementation of a linear phase-shift PI controller during steady-state operation.
As can be seen in Fig. 10c, when operating at the rated power, the output voltage of the high-frequency inverter is smoother than square waves. This waveform attains a peak value of 113 V subsequent to undergoing modulation via inductor L1. The utilization of this waveform as an input contributes to the effective suppression of high-frequency transformer noise while concurrently enhancing the overall efficiency of the DC power supply.
A test to effectively validate the dynamic attributes of the high-voltage DC power supply is depicted in Fig. 11. The transition of the supply source from 220 V AC to 24 V DC is discerned in Fig. 11a. From this illustration, it is apparent that the regulation duration of the DC power supply is 3.96 ms, coupled with a voltage reduction of 139.56 V. In Fig. 11b, the dynamic characteristics of the output voltage during amplitude fluctuations of the DC power supply, oscillating within a 15% range, are demonstrated. Here, the regulation time of the DC power supply is 3.4 ms, with the voltage undergoing fluctuations of 40.5 V. An examination of these waveforms reveals that the system effectively operates within the realm of critical damping during shifts in the input voltage. Notably, the output voltage exhibits minimal oscillation during the recovery phase, accompanied by a small overshoot. Simultaneously, the voltage exhibits minimal jitter. This outcome is attributed to the presence of a capacitor within the voltage-doubling circuit. This capacitor mitigates abrupt voltage changes, culminating in smoother output voltage profiles during the fluctuations stage.

Dynamic characteristics of the DC power supply when the input voltage is increased by 15% and decreased by 15%: a response characteristics of the output voltage u0 when the input is changed from AC to DC; b response characteristics of the output voltage u0
5 Conclusion
In this paper, a high-voltage DC power supply with 10 kV for an intense field dielectric was designed and a new SM-PSFB controller was designed for this power supply. Simulation results demonstrated that the response speed of the SM-PSFB controller is 2–7 times faster than that of PWM-SM when different types of faults occur. Furthermore, a 10 kV power supply was built to verify the correctness of the power supply topology design and the new controller. According to the results, a power supply satisfying the working requirements was obtained, and the controller was shown to have good steady-state and dynamic performance, which can protect the power supply when a fault occurs. In addition, the future work will focus on the SM-PSFB controller working principle under nonlinear changes of the system.
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Kim, Y.-J., Han, B., Woo, C.G., Kim, H.: Ultrafine particle collection performance of a two-stage ESP with a novel mixing—type charging stage using different geometries and electrical conditions. IEEE Trans. Ind. Appl. 53, 5859–5866 (2017). https://doi.org/10.1109/TIA.2017.2739698
Kim, J., Kim, H., Han, B., Lee, S., Lee, J., Moon, S.: Particle removal characteristics of a high-velocity electrostatic mist eliminator. Aerosol Air Qual. Res. 20, 852–861 (2020). https://doi.org/10.4209/aaqr.2019.12.0648
Abdalla, O.H., Sharaf, S.M., Feshara, H.F.: Identification of a high voltage unit in an electrostatic precipitator. Eleventh International Middle East Power Systems Conference, 240–245 (2006). https://ieeexplore.ieee.org/document/5372350
Fan, S.W., Yuan, Y.Q., Jia, P.Y., Chen, Z.G., Li, H.S.: Design and analysis of high voltage power supply for industrial electrostatic precipitator. Int Power Electron Conf 11, 78 (2018). https://doi.org/10.23919/IPEC.2018.8507386
Lu, J.J., Liu, Y.K., Ji, J.P.: Research on circuit topology of high voltage dc pulse power supply for removing wide-diameter dust. Chin. Autom. Congr. (2018). https://doi.org/10.1109/CAC.2018.8623092
Chen, W.H., Yang, J., Guo, L., Li, S.H.: Disturbance-observer-based control and related methods—an overview. IEEE Trans. Ind. Electron. 63, 1083–1095 (2016). https://doi.org/10.1109/TIE.2015.2478397
Abdalla, O.H., Sharaf, S.M., Feshara, H.F.: Identification and optimal PI control of an electrostatic precipitator. Proceedings of the sixteenth international conference on aerospace sciences and aviation technology (2015). http://asat.journals.ekb.eg/article_23025.html
Cohen, I.J., Wetz, D.A., McRee, B.J., Dong, Q., Heinzel, J.M.: Fuzzy logic control of a hybrid energy storage module for use as a high rate prime power supply. IEEE Trans. Dielectr. Electr. Insul. 24, 3887–3893 (2017). https://doi.org/10.1109/TDEI.2017.006647
Kunjittipong, N., Kongkanjana, K., Khwan-on, S.: Comparison of fuzzy controller and PI controller for a high step-up singleswitch boost converter. The 3rd International Conference on Power and Energy Applications, pp. 94–98 (2020). https://doi.org/10.1109/ICPEA49807.2020.9280118
Shakir, M., Aslam, S., Adnan, M., Janjua, K.A.: Fuzzy logic based closed loop buck boost AC–AC automatic voltage regulator. In: 2021 International Conference on Engineering and Emerging Technologies (ICEET), Istanbul, Turkey, 27–28 October 2021, pp. 274–281 (2021). https://doi.org/10.1109/ICEET53442.2021.9659640
Leon Masich, A., Valderrama Blavi, H., Bosque Moncusí, J., Maixé Altés, J., Martínez Salamero, L.: Sliding-mode-control-based boost converter for high-voltage-low-power applications. IEEE Trans. Ind. Electron. 62, 229–237 (2015). https://doi.org/10.1109/TIE.2014.2327004
Patra, D., Roy, B.K.: Robustness test in conventional and integral sliding mode control. International Conference on Communication, Control and Information Sciences, pp. 1–5 (2020). https://doi.org/10.1109/ICCISc52257.2021.9484928
Al Baidhani, H., Kazimierczuk, M.K., Salvatierra, T., Reatti, A., Corti, F.: Sliding-mode voltage control of dynamic power supply for CCM. In: 2019 IEEE International Symposium on Circuits and Systems (ISCAS), Sapporo, Japan, 26–29 May 2019, pp. 1–5 (2019). https://doi.org/10.1109/ISCAS.2019.8702628
Al Attar, H., Ghanes, M., Hamida, M., Taleb, M.: Control strategies design and comparison of DC-DC LLC converter in V2X mode for electric vehicle charger application. IEEE Conference on Control Technology and Applications, pp. 1154–1159 (2021). https://doi.org/10.1109/CCTA48906.2021.9659000
Zheng, K., Zhang, G.D., Zhou, D.F., Li, J.B., Yin, S.F.: Modeling, dynamic analysis and control design of full-bridge LLC resonant converters with sliding-mode and PI control scheme. J. Power Electron. 18(3), 766–777 (2018). https://doi.org/10.6113/JPE.2018.18.3.766
Zhao, Y.Y., Huang, X.R., Zhang, T.S., Peng, Y.Q., Liu, X.R.: Integrated sliding mode PI hybrid control of full bridge LLC resonant converter. Control Eng. China (2022). https://doi.org/10.14107/j.cnki.kzgc.20220458
Bagheri, F., Guler, N., Komurcugil, H., Bayhan, S.: An adaptive sliding mode control for a dual active bridge converter with extended phase shift modulation. IEEE Access (2023). https://doi.org/10.1109/ACCESS.2023.3264013
Xiao, W., Lei, L., Chen, Q.H., Zhang, L.Y., Quan, S.H.: Sliding mode control of a phase-shifted full bridge DC/DC converter. 32nd Youth Academic Annual Conference of Chinese Association of Automation, pp. 138–142 (2017). https://doi.org/10.1109/YAC.2017.7967393
Wasan, P., Krischonme, B., Prakasit, P., Preecha, Y., Yuttana, K.: Phase-shifted full-bridge ZVS DC–DC converter with synchronous double rectifiers for battery charging applications. Int. Trans. Electr. Energy Syst. 2022, 4813528 (2022). https://doi.org/10.1155/2022/4813528
Zhang, J.M., Xie, X.G., Wu, X.K., Qian, Z.M.: Comparison study of phase-shifted full bridge ZVS converters. IEEE 35th Annual Power Electronics Specialists Conference, pp. 533–539 (2004). https://doi.org/10.1109/PESC.2004.1355803
Shi, K.M., Zhang, D.L., Zhou, Z.C., Zhang, M.Q., Zhang, D., Gu, Y.: A novel phase-shift dual full-bridge converter with full soft-switching range and wide conversion range. IEEE Trans. Power Electr. 31, 7747–7760 (2016). https://doi.org/10.1109/TPEL.2015.2512848
Aksoy, H., Aydemir, M.T.: Comparison of zero voltage switching phase-shifted PWM full bridge DC–DC converter topologies. International Aegea Conference on Electrical Machines and Power Electronic, pp. 818–824 (2015). https://doi.org/10.1109/OPTIM.2015.7427028
Xing, Z.L., Zhou, G.X., Guo, L., Song, N.R., Zhang, G.D., Zhang, H.W.: Research on phase shift full bridge converter based on nonsingular terminal sliding mode technology. China Autom. Congr. (2022). https://doi.org/10.1109/CAC57257.2022.10055342
Mao, S.J., Popović, J., Ferreira, J.A.: Diode reverse recovery process and reduction of a half-wave series Cockcroft–Walton voltage multiplier for high-frequency high-voltage generator applications. IEEE Trans. Power Electr. 34, 1492–1499 (2019). https://doi.org/10.1109/TPEL.2018.2834406
Katzir, L., Shmilovitz, D.: Effect of the capacitance distribution on the output impedance of the half-wave Cockcroft-Walton voltage multiplier. IEEE Appl. Power Electron. Conf. Expos. (2016). https://doi.org/10.1109/APEC.2016.7468395
Liu, Y., He, Z.X., Hou, R.J., Lin, L.H., Dong, H.Y., Wang, F.: A multimode wide output range high-voltage power supply for magnetrons. IEEE Trans. Ind. Electron. 70, 11153–11162 (2023). https://doi.org/10.1109/TIE.2022.3225803
Mocevic, S., Yu, J.H., Fan, B.R., San, K.Y., Xu, Y., Stewart, J.: Design of a 10 kV SiC MOSFET-based high-density, high-efficiency, modular medium-voltage power converter. iEnergy 1, 100–113 (2022). https://doi.org/10.23919/IEN.2022.0001
Vukosavić, S.N., Perić, L.S., Sušić, S.D.: A novel power converter topology for electrostatic precipitators. IEEE Trans. Power Electr. 31, 152–164 (2016). https://doi.org/10.1109/TPEL.2015.2405471
Lu, X.: Stability Analysis And Design Of A High-Voltage Direct-Current Power Supply For Electrostatic Precipitator. M.S. thesis, Electrical Engineering, Southeast University, Nanjing, China (2021). https://doi.org/10.27014/d.cnki.gdnau.2021.001076
Valdivia, V., Barrado, A., Lázaro, A., Fernández, C., Zumel, P.: Black-box modeling of DC–DC converters based on transient response analysis and parametric identification methods. Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition, pp. 1131–1138 (2010). https://doi.org/10.1109/APEC.2010.5433361
Acknowledgements
This work was supported in part by Supported by State Key Laboratory of Electrical Insulation and Power Equipment (EIPE22207).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all the authors, the corresponding author states that there is no conflict of interest.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Liu, C., Han, P., Cheng, X. et al. 10 kV high-voltage DC power supply design with novel sliding-mode phase-shift controller for intense field dielectrics. J. Power Electron. (2024). https://doi.org/10.1007/s43236-024-00825-1
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s43236-024-00825-1