对机器人或人工智能的研究能帮助人类更了解自身吗?
32 个回答

对机器人或人工智能的研究会帮助我们更好的了解人类自己吗?
题主给了赵思家的知乎专栏文章。对位置细胞和网格细胞很好的介绍。去年在我等review的时候也写了一点点2014年诺奖生理学医学奖的意义被知乎日报收了~ 这可以算本问题的一个短答案。
发现大脑 GPS 系统的三位大师,刚刚获得了诺贝尔奖首先要做个简单科普,也算对这个主问题的一个回答。从方法论上解读一下人工智能的研究方向分别试图在什么量级去模拟人脑的功能?
现有的大多数人工智能的研究领域其实都是仅仅去模仿人脑的某个功能,至于原理是否相似,大家并不关心。比如游戏内的AI,用状态机,行为树(当然机器人研究也常用),这些研究对人来说有点像心理学研究。所以Herbert Simon既是人工智能的大家,也是心理学的大家。计算机视觉的研究,大都是仅仅为了达成识别物体或理解场景的目的,从数学上是很清晰的,但并没有研究脑的工作模式或采用类脑的方式。对于一份研究工作来讲,讲不清楚原理或者无法复现,是很难被科学界接受的一件事情。类脑的研究可能有时局限于这种“讲不清楚”。终极一点想,如果模拟脑可以产生意识,那么每个意识肯定是独立而且不可复制的。现在的科学体系大概是需要用量子的观点来接受这种个体随机整体可统计的人工智能吧。这是不是又好像在研究人类社会学了呢?
这种AI因为强调解决问题,所以大部分人了解到的人工智能都是这个方向。工程应用中也大多数是这种AI。
还有从类似人脑宏观工作方式的角度去研究人工智能的科学家们。大脑的大体解剖学告诉我们脑不仅仅是顶叶额叶颞叶枕叶四个区,Brodmann将大脑分了近50个区,现代则将大脑进行了更精细的划分。神经学家努力的研究每一部分的大脑进行哪些工作(大多数都研究很基本的功能),计算神经学家就希望可以把每一部分的小功能模拟出来,不管机理是不是类脑,然后希望可以完成一个比较强的完整功能。比如HMAX,大概模拟了视觉的6个皮层,然后也实现了物体识别的功能。Brain Based Device,进行了很多方面的尝试,可以完成简单的导航功能。这类研究不求模拟神经元级别的脑活动,仅仅希望可以通过大脑各部分的小功能以及各部分的连接关系复现一些智能,或者印证对大脑的一些猜想。因为不需要完全依照大脑的结构,所以可以部分类脑,部分就是纯工程的方法,可以有一定的应用价值。我们的研究也可以算作这个范畴。
(关于题主第二个小问题,还有哪些类似的利用机器人进行局部的人脑的认知功能的研究?
上面的回答里提到了一些。如果希望了解人工智能方向局部人脑认知功能的工作,可以看看前不久唐华锦博士在杨静的新智元上发表一个简单的综述。同时新智元上还有一些其他类脑计算的好文章~大家可以关注其公众号。
【类脑专辑】神经拟态认知计算)
后来人们发现大脑是亿万个神经元的连接,所以也有人从微观入手,研究神经元的连接,希望用工程方式重现小部分脑,试试可不可以做出该部分的功能。但是鉴于现在对于脑的了解太少,而且部分重建未必就能实现在整体脑中的功能,这一部分工作还多数停留在研究阶段。神经形态学,脉冲神经网络,更类似这种研究。当然还有计算神经学家从建立每个神经元开始,也未必要实现某些功能,我现在能记得的就是耶鲁大学的NEURON模拟软件。这种研究就非常的基础了,我也不知道还能不能划分在人工智能领域。
从事一项机器人或者人工智能的研究工作,未必就能对人的本身更加了解,但是确实有科学家是一直向这方面努力的。包括现在的深度学习,是一种更类似人脑神经元获取反馈的学习方式,但是网络和学习过程并没有追求类脑。进化计算也是希望学习脑的成长方式,但是技术实现上也完全不相关。而其他更多的细分方向,大都是为了解决问题,而不是了解人类自己。
下面回答题主第一个小问题:试问,新加坡科技研究局的此次探索有着怎样的意义?
作为题主问题中提到的论文作者之一,我仅仅想简单的为大家介绍一下我曾所在的研究组接近四年的一些工作(内容略长),希望可以为大家了解这一个新兴的研究方向提供一点帮助。同时让大家可以自己判断研究的意义。这篇论文2014年我们投NIPS被拒绝,后来投AAAI,正好在review期间O‘Keefe和Moser夫妇拿了诺贝尔奖,review的分数非常高,reviewer也很激动,最后拿到了Oral Presentation。可是另外一部分详细写机器人应用的部分,被ICRA无情拒绝,因为有几个reviewer说和传统state-of-the-art的方法比,我们的建图和导航没有突破。人工智能和机器人都是很广泛的领域,我们的研究应该是偏向对脑理解,可能经常不太照顾性能和效率。
我们大家都信心满满这个工作会取得一些关注,可是从2015年1月龙哥(Yuan Miaolong)去开会,一直到2015年10月ScienceDaily和MIT Technical Review报道了这个工作之后,有一些朋友开始关注我们。这次知乎上有朋友提问,我们也希望借这个机会把这几年的工作用中文介绍给大家。
MIT Technical Review的报道
A Robot Uses Specific Simulated Brain Cells to NavigateScienceDaily的报道
Navigating the unknown: Computer algorithm copies ...译文:
一种借鉴人类和动物导航能力的计算机算法(守心斋译文)将时间拨回2011年----------
看了我几年的工作报告,为大家全面展示一下我们怎么发展到去做这个工作,点点滴滴的积累,研究工作才能取得些许突破。
以下提到名字的多是大神,大家可以自己搜索下。
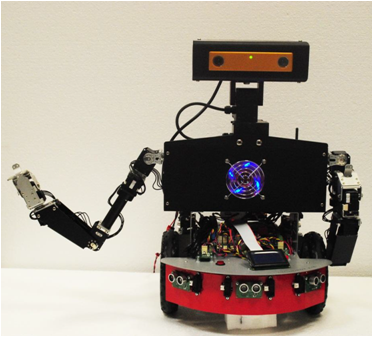
2011年6月,首先是完成一个实体的机器人~ NECO,也就是Nerual Cognitive Robot,这是第一代,参考Wall-E。当时的设计有一些硬伤,底盘没有码盘,方向的获取是指南针。指南针可以拿到一个绝对方向,这和生物系统本身是违背的。直接的问题就是在室内磁场强的地方获取的方向偏差太大。
目标是实现一个十字迷宫的搜索。场景如下:


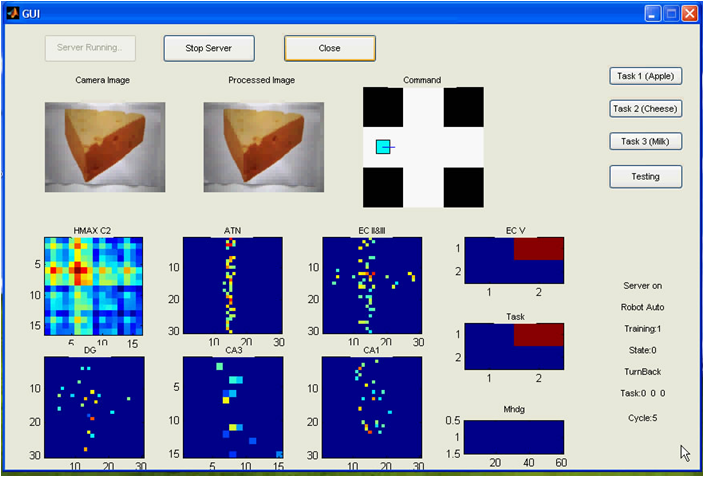
这是Edward Tolman曾经给老鼠设计的一个迷宫,用来论证老鼠大脑中存在认知地图。我们把一个小机器人放进去,希望机器人在搜索之后,下一次我们给他一个刺激,他下一次可以直接找到相应的地点(左边是出发点,其他位置是牛奶,奶酪和苹果)。我们当时是跟随Gerald Edelman所做的Brain Based Device的研究,根据大脑的部位连接方式建立神经网络计算模型,放入机器人中看是否可以重现生物实验。我们基本是一直延续这个思路。他们不关心微观的神经元活动,只希望用功能模块验证大脑各部分之间的连接。我们这个工作是希望可以复现他们的一篇文章。(Sensory Integration and Remapping in a Model of the Medial Temporal Lobe During Maze Navigation by a Brain-Basede Device) 因为他们的研究没有公布源代码,所以我们根据文章重新写了一份Matlab的代码。我当时的工作主要是机器人上的代码实现。没有参与算法的部分。Huang Weiwei师兄用HMAX模型(Tomaso Poggio的视觉神经计算模型)替换了了原作中的传感器计算模型。
软件的界面大概是这样。。那些矩阵都是神经计算模型的状态。

2011年9月,开始了RatSLAM的研究。作者Michael Milford是一个年轻的机器人科学家,主要的成果是Posecell(位姿细胞,只是计算模型,不是大脑中真实存在的神经元),在某些性质上已经和网格细胞有点类似。我们把迷宫改成了如下,建图的部分完全依照了RatSLAM的算法。
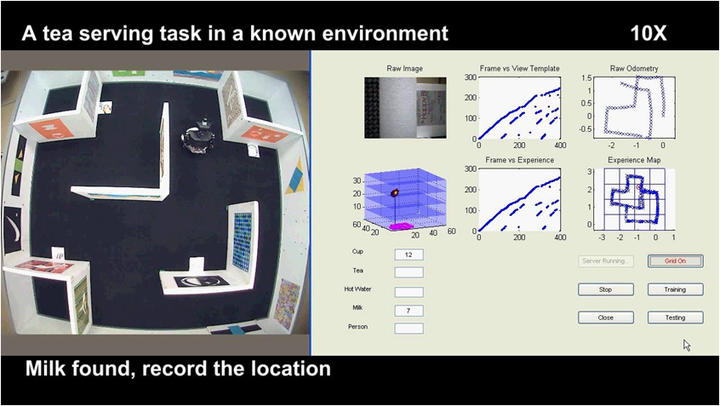

不过我们在导航的部分加入了Ole Jessen的Episodic Memory(情节记忆)模型。
结果表达大概是这个样子。。。

写了一篇期刊论文,截止目前还是unpublished..
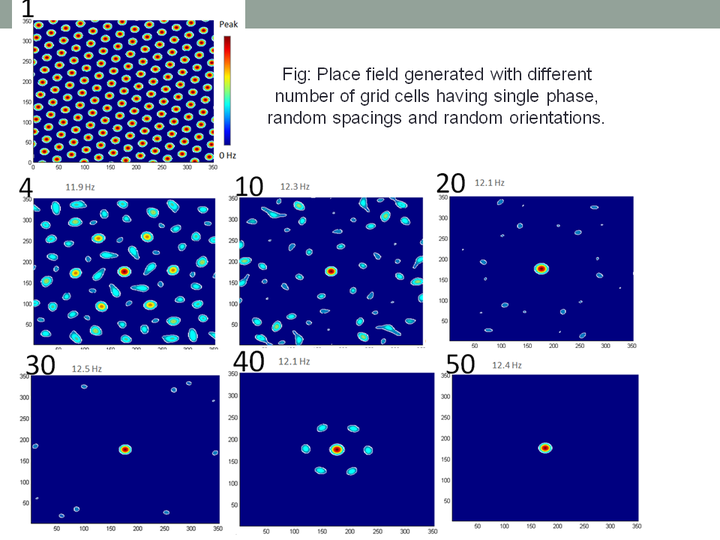
当时工作的两个硬伤,第一是核心计算模型都是别人的,于是Tang Huajin博士让大家首先去研究Place和Grid cell的计算模型。这些文章大多数都发表在Nature,Science,PNAS,PloS等期刊上,这项工作是硬骨头,于是开始了一些粗糙的工作。。还是上面的迷宫,仅仅用生成Grid Cell的一个模型,主要由一个大四的学生完成,当然现在看来这个工作的原理应该是错误的。。最后结果是右下的图。不过这个结果还是获得了学院的优秀毕业设计~

后来还有一个大四学生做了一些初步的网格细胞叠加成位置细胞的试探。这也是重现一篇论文From grid cells to place cells: a mathematical model的工作。不过这个论文的问题是只是理论上验证网格细胞出现的grid field可以通过线性叠加得到位置细胞的place field。但是place field只会出现在环境的中间。。。

在2012年6月后对于Grid Cell和Place Cell计算模型的研究就暂时搁置了。。
在此期间,大家深感迷宫中的工作不容易被接受,大老板Li Haizhou给出意见是首先下力气把机器人搬到实际环境中,不必急着去应用各种神经计算模型,于是后面的一段时间我们都在做这个事情。。
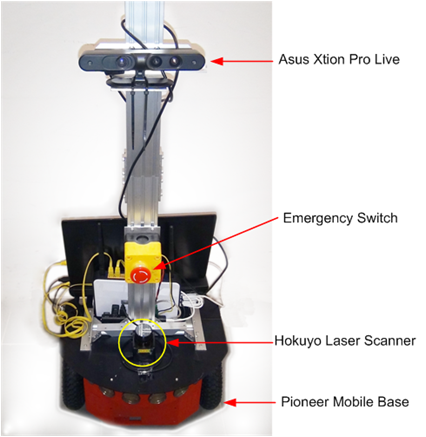
首先做了一个更丑的机器人,但是整个系统换到了ROS下面。同时研究了一下RGBDSLAM和深度传感器。(其实还有两个很高级的摄像头,不过我没有在他们上面做研究工作)。机器人变成这样
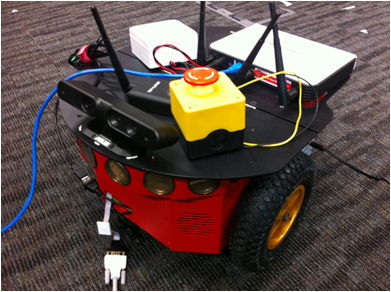
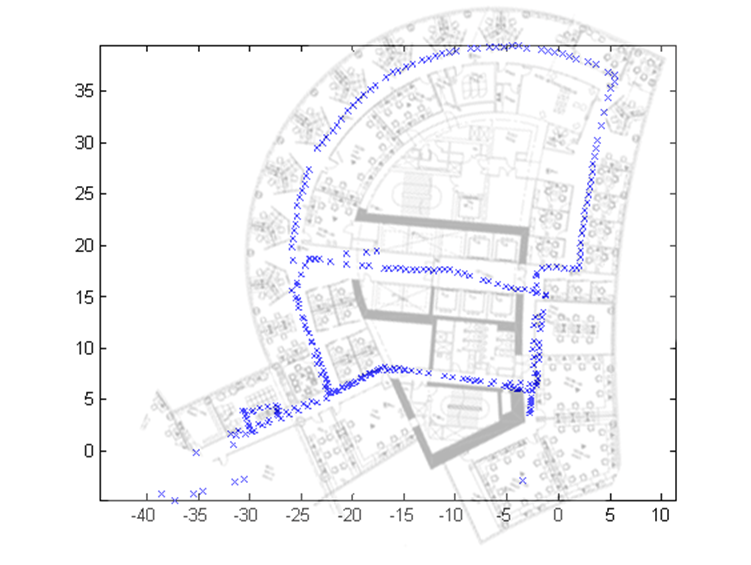
因为没有人用单一的kinect做大范围建图导航,我们在自己的办公室内做了一个尝试,建图效果还不错,导航略差。。

后来又利用kinect做了一些人机交互的尝试,不得不说kinect真是神器。机器人稍微好看了点。。

Shim Vui Ann花了很多精力解决局部导航的问题,我也把建图的精度提高了些。这次在办公室内导航已经比较随意了~ 地图上给了五个点试了试,基本可以和Willow garage用navigation package做出的结果相媲美。


这两篇文章都发表在了IROS上,虽然核心算法还是RatSLAM,算是对我们机器人工作的一个肯定。这些工作结束之后又回到了一个老问题,研究神经认知算法,怎样才能把Grid Cell和Place Cell的计算模型用在机器人上?神经学家大多数的工作都是通过观察老鼠和记录神经活动状态,通过归纳的方法给出计算模型。这些模型大都是比较支离破碎的,比如如何生成Grid Cell,如何做线性叠加以及采用什么学习的模型,Grid cell如何做路径积分,等等。因为生物学家没有办法获取生物的感知信号,所以大家都是猜测place cell会和视觉等信号形成联合记忆,并且在下一次认出某个位置的时候会对路径积分的误差做重置。这个部分就是机器人SLAM中常研究的loop closure(闭环)。所以我们的工作看起来是要把这些计算模型连起来,计算神经学没有的模型就从机器人学里面拿,但是必须要把整个系统的功能做完备。然后再试着能不能用机器人复现生物实验。也就是监测其中的grid cell和place cell,看看他们是不是像老鼠脑中的细胞一样会在特定的位置激发。
然后就是Yuan Miaolong沿着之前粗浅的工作继续前行,论文读了无数,并且在某天拿着Yuram Burak的论文手舞足蹈(Accurate Path Integration in Continuous Attractor Network Models of Grid Cells),这篇论文大概是设想grid cell在大脑里的neural sheet是和grid field在环境中的形状差不多。同时把整个grid cell做路径积分的原理讲的很清楚。但是论文有点错误,就是把上帝视角的数据拿来放在自己的视角里做计算。说白了就是机器人学里说的坐标系转换有问题。
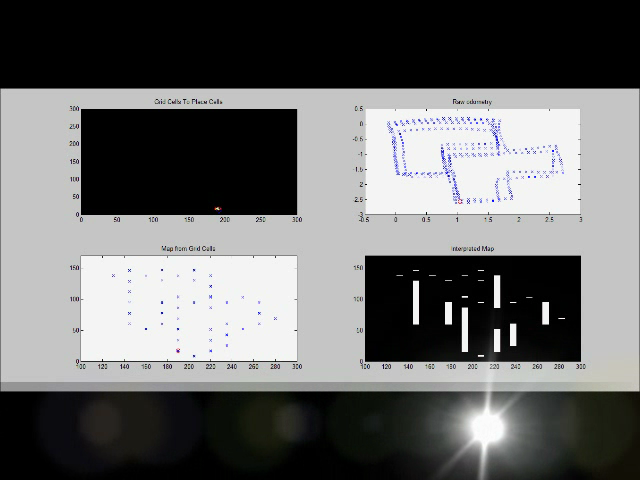
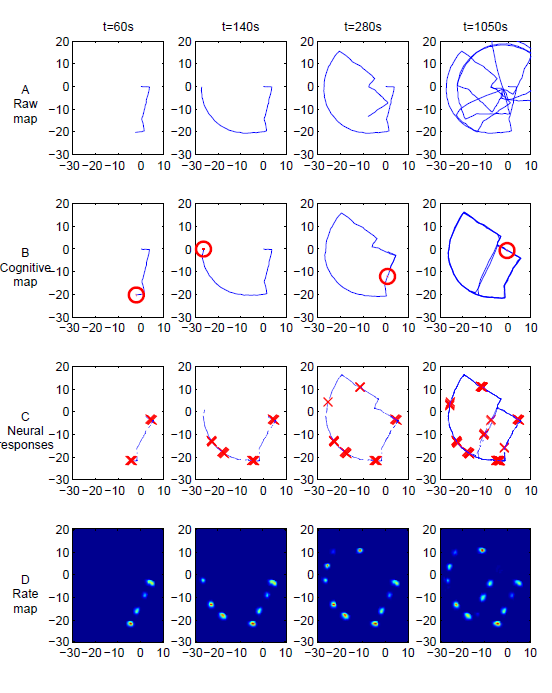
后来的工作包括从Grid cell叠加到place cell,联合记忆,重置,方向细胞,都用了比较工程的方式并采用了很多神经科学家的猜想。工作一共进行了接近一年,代码量很大。。比如仅仅生成下图结果的代码就有几千行。

神经认知机器人的项目在唐华锦博士的研究组里从2010年就开始研究。我从2011年6月进入唐华锦博士的神经计算组到2015年2月离开,工作了接近四年时间。各个研究方向其实划分的很细,神经认知方向和我们常说的人工智能虽然志在解决相似的问题,但是采用的方法和思路确实差异很大。


谢邀
就我个人的观点来看:人工智能的研究可以看作是某种意义上的仿生学,也就是说至少到目前为止,人工智能研究者所在做的事情包括模拟从微观的神经遗传等到宏观的生态系统等一系列生物自发行为的行为模式,并以此来实现某些在当前技术条件下无法通过单纯的计算来快速解决的问题。
那么对于题主的三个小问题,我个人的看法是这样的:
1. 试问,新加坡科技研究局的此次探索有着怎样的意义?
一种新的人工神经网络结构,即使仅仅还处于理论阶段,也会为将来的应用化提供了某个可供开发的方向。
2. 还有哪些类似的利用机器人进行局部的人脑的认知功能的研究?
很多。常见的来说模糊识别,寻路,推荐,行为模式分析很多都是通过各种结构的人工神经网络来完成的。
3. 对机器人或人工智能的研究会帮助我们更好的了解人类自己吗?为什么?
作为研究者角度来说,人工神经网络把计算机科学和神经/脑科学联系了起来,双方在交流的时候必然会产生某种程度的互补从而有可能碰撞出新的火花。就目前来说,人工智能的研究受限于各种条件依然基本停留在行为分析->提取抽象模型->简化->模拟行为这个过程上,距离有效的反哺到生物领域应该还有一定的距离。但是我相信发展到一定阶段之后,就如同其他的学科间交流一样,对人工智能深入的理解和研发一定会增强人们对于“智能行为本质”的深入理解,并且帮助我们更好的认识自己。