




【我們為什麼挑選這篇文章】除了汽車,現在連腳踏車都可以自動駕駛!中國有神人 DIY 了一台自動腳踏車,能夠自己前進、轉彎、避開障礙物,就算靜止也不會倒。下文帶你看,神人打造自駕腳踏車的過程。(責任編輯:郭家宏)
本文經 AI 新媒體量子位(公眾號 ID:QbitAI)授權轉載,轉載請連繫出處
作者:量子位
果然高手在民間。
誰能料到,一輛自行車的硬核打開方式,竟是大夯的自動駕駛。
踢開腳架,金雞獨立、穩如泰山:

單側加個板磚?小 case:

畢竟,它是連高難度「雜技姿勢」都能 hold 住的自行車:
沒事走兩步?
可以有,還是會自己轉彎的那種:

避障、上路,毫無壓力:
甚至還配備了特斯拉都沒有的光達。
這就是 B 站「野生鋼鐵人」稚暉君耗時 4 個月時間(基本只是週末),打造出的全新項目 XUAN (軒)。

短短幾天,播放量超過 150 萬,硬核、複雜程度之高,直接看呆一眾網友。
來感受一下這個畫風。
連 B 站老闆陳睿都被吸引而來:

甚至業內人士也直呼:
任何一個部分拿出來都是一篇大學畢業論文。
還有實物,碩士畢業綽綽有餘……

稚暉君到底是如何打造的這麼一台「賽博龐克」自行車?
接下來,讓我們一起一探究竟(經授權)。
(你可能還很關心它的價格,別著急,我們文末揭曉答案~)
讓自行車有自駕功能,需要進行 3 個步驟
稚暉君選擇的自行車,是大家非常熟知的死飛 (Fixed Gear)。
(沒錯,就是甩尾玩家的最愛)
這種自行車的一大特點,便是結構簡單、沒有剎車。
於是,稚暉君先對死飛進行了一個 CAD 建模的工作。
建模工作完成之後,便得到了一輛虛擬自行車。
此後的所有改造工作,便可以在電腦上完成。
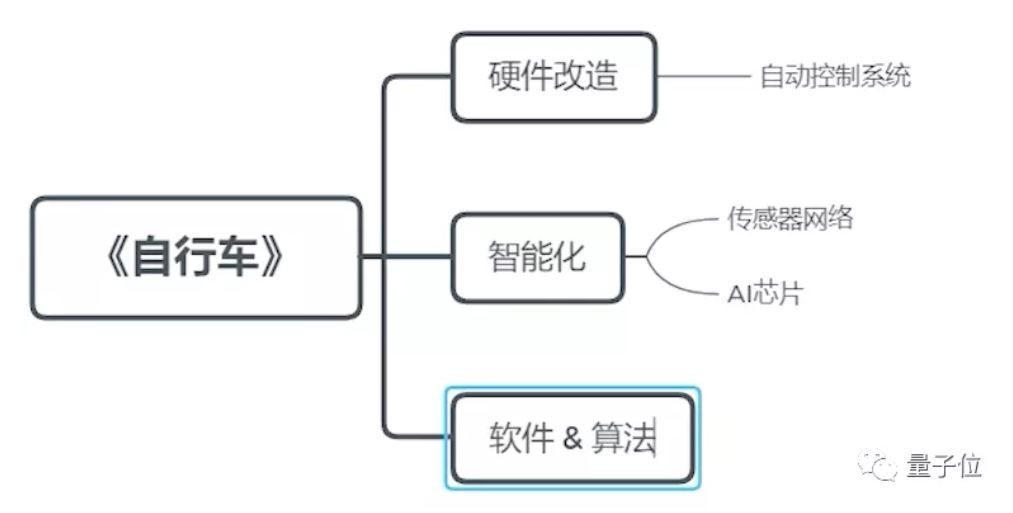
整體來看,XUAN 的誕生一共分為三大步:
▌硬體改造:因為自行車是一個欠驅動系統,所以先要做的就是讓它站穩,然後跑起來。這一步將涉及一套複雜的自動控制系統。
▌智慧化:畢竟自動駕駛嘛,「工具人」就得被抹去。因此,這一步便是搭載一整套感測器組成的感知網路,以及一個算力足夠強大的運算晶片作大腦。
▌軟體和演算法:最後一步,便是在上述的硬體基礎上,開發、實現一套感知和控制演算法。稚暉君稱之為「注入靈魂」。
Step by Step,先來看下第一個大問題。
自行車怎麼自己保持平衡?
在騎自行車的時候,前後方向的平衡,靠的是 2 個輪子的支撐和地面摩擦力。
而左右方向上,運動過程中靠的是龍頭的左右調節,獲取轉向的加速度,以此抵消重力的影響。像這樣:

那麼在靜止狀態下呢?
稚暉君給出的思路便是——角動量守恆。
簡單來說,當車子在重力作用下發生傾倒,就用動量輪來產生一個相反力矩,抵消掉重力力矩。
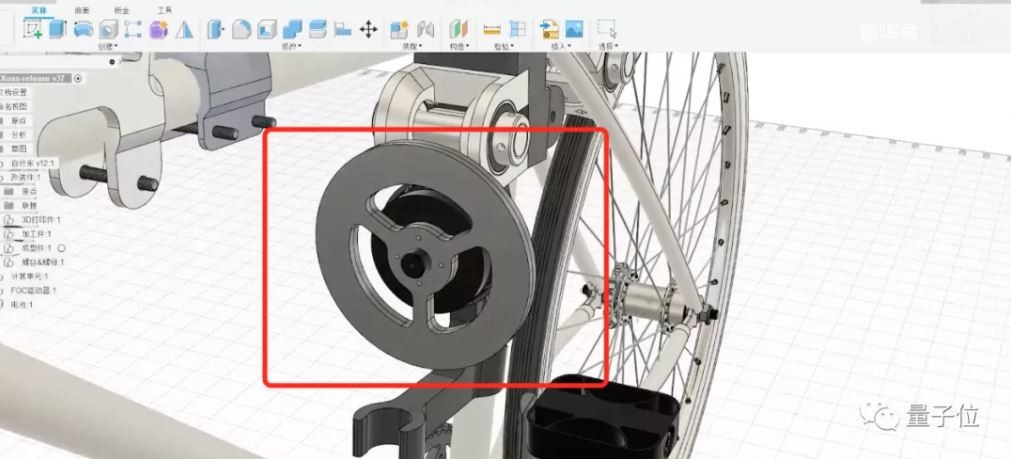
具體而言,稚暉君在這輛死飛座位下方安裝了一個無刷電機,目的是驅動一個金屬的動量輪。
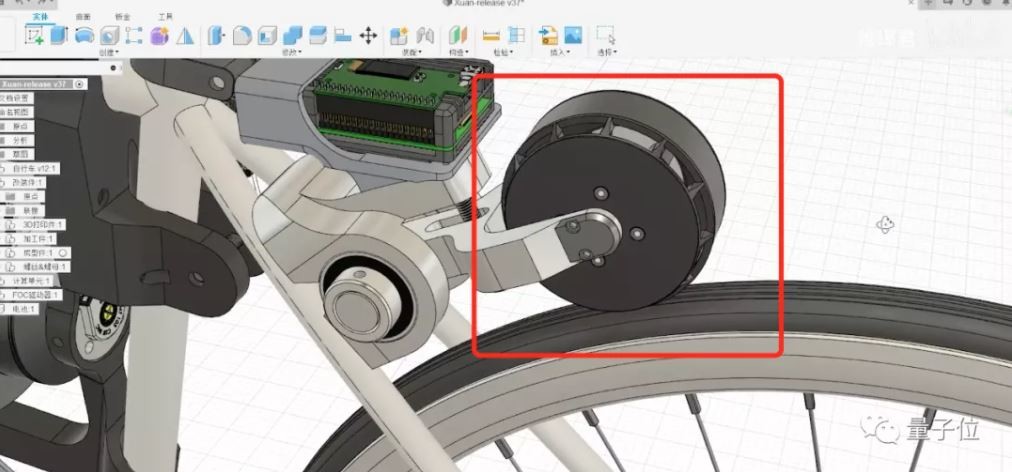
而在座位後方,他也安裝了一個無刷電機,這個目的則是靠摩擦力來驅動後輪,讓自行車整體前後運動。
稚暉君本是想用 3D 列印來完成這兩個零件的加工,但礙於材料硬度和剛性不足,所以金屬材料成為了此次的首選。
(所幸,稚暉君朋友家裡「有廠」,問題迎刃而解)
而後,便是快樂的組裝環節:
OK,自行車的平衡問題,就此解決。
自行車的「腦」,也有分大腦跟小腦
硬體框架有了,想讓自行車能跑起來,甚至能認路,下一步就是上「腦子」。
跟人類相似,機器人也分「大腦」和「小腦」。
簡單來說,小腦用來控制即時行動;大腦則負責耗費算力,執行高時延的感知和決策。
這一回,稚暉君給自行車上的「小腦」是 ESP32。
ESP32 是一種低成本、低功耗的單片機控制器,整合 Wi-Fi 和雙模藍芽。
基於 FreeRTOS(一個開源嵌入式即時操作系統),稚暉君搭建了小腦的 RPC 通訊框架,用來實現感測器的數據處理,以及電機的控制演算法。
「大腦」則是昇騰 310。這是昇騰系列的邊緣運算晶片,基於達文西架構,最高能夠提供 22 TOPs 的算力。

大腦的演算法開發,主要基於昇騰 AI 棧和 ROS(機器人操作系統)實現。
於是,在深度相機、光達等感測器的幫助之下,這輛自行車能夠檢測出周圍的物體,實現避障和跟隨:
還能夠機智地識別地形,給自己規劃路徑:

自行車的「心臟」,是個 FOC 驅動器
當然啦,「成精」的自行車,不僅要有頭腦,還要有一顆強勁的「心臟」來驅動它工作。
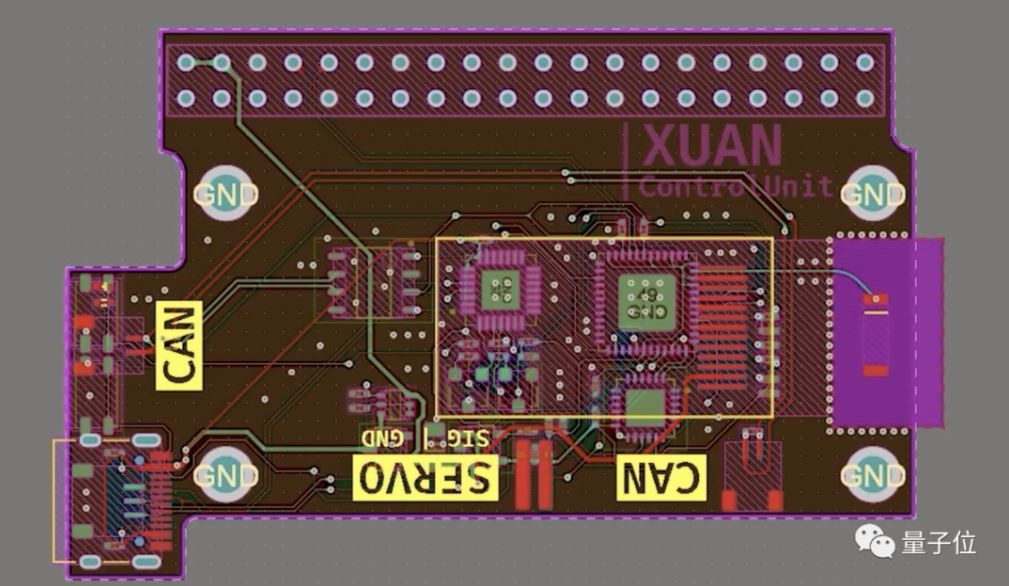
而 XUAN 的「心臟」來自稚暉君的另一個項目,Ctrl-FOC 矢量控制驅動器。
這是一個超迷你雙通道無刷電機驅動器,單路最大驅動電流能超過 100 A。
值得一提的是,稚暉君的這一 FOC 驅動器有兩個版本的設計方案,其中一個版本,電路設計為上下疊板設計,將邏輯單元和功率單元分開。也就是說,只需要替換掉驅動電路,就可以匹配更大功率的電機。
具體到 XUAN 這個項目,下圖中這麼大點的驅動器,最終實現了兩路共 100 A 的無刷電機 FOC 控制,還驅動了車頭 60 kg 扭力舵機和散熱風扇。

自行車的「靈魂」:自駕參數
萬事俱備,但想要上路,至此還少了一點煉丹的靈魂——調整參數。
稚暉君表示,這輛自動駕駛自行車的控制程式碼中,有超過 50 個重要參數,包括控制週期、回饋矩陣、PID 增益、濾波器截止頻率等等。
此外,電機的功率、重心的分佈等物理參數,也都會對最終的效果造成影響。
稍有不慎,那自行車就不是穩如老狗那畫風了……

在數學建模之後,稚暉君還採用了遊戲引擎 Unity 作為仿真環境,像正經自動駕駛研發那樣,先在仿真環境裡讓自行車跑了個踏實。
總之,讓一輛自行車成熟起來,自己上路,夠不容易的。
就有網友表示:
人傻了,畢業設計題目是自行車自平衡系統設計,做到調參就不會了。
不過,受限於整車功率,目前這輛自行車還不能載人。
另外,也有網友提出,用動量輪來控制平衡屬於某種意義上的作弊。對此,稚暉君回應:現在的龍頭傳動結構設計不太合理,之後會嘗試只用龍頭控制平衡。
為什麼要造XUAN?
有關「棧溢出工程師」、「野生鋼鐵俠」稚暉君,想來關注 B 站科技區的小夥伴們已經很熟悉了。
稚暉君本名彭志輝,2018 年畢業於電子科技大學,2020 年通過「天才少年計劃」加入華為。
他的影片向來以硬核著稱,比如從手畫 PCB 到寫 C++ 程式碼全部一人搞定的套娃小電視。
辣麼這次,稚暉君又是怎麼萌發了打造一輛自動駕駛自行車的念頭的呢?
理由有些「暴力」……
騎車不小心摔了,臉剎著地……
稚暉君表示,「這事不能就這麼過去了」,於是乎:
(心疼稚暉君幾秒)
當然,稚暉君本人也在影片中表示,其實很早就有設計這種自行車的想法。
最初是因為看到清華大學的那項自行車研究,可以跟隨人類,敏捷避開障礙物。
其背後的類腦晶片「天機」,也於 2019 年 8 月登上 Nature 封面。
好奇的小夥伴肯定會問了,二者有何區別?
量子位替你們問完了哈!
首先,是原理不太一樣。
清華的自行車模仿的是人類行為,沒有使用動量控制,而稚暉君的「軒」則涉及到了動量控制。
此外,在龍頭方面,稚暉君表示在改進過後,也可以實現清華的控制方式(移動過程使用龍頭平衡,靜止狀態使用動量平衡)。
但最核心的一個區別就是,清華打造的自行車背後,核心是類腦晶片。
對此,稚暉君表示:
他們的工作很厲害,我這個無法類比,只是受他們啟發做了個類似的應用。
為了體現跟清華工作的區別,稚暉君本人還在專案名字上下點了功夫。
XUAN 裡的 U,代表的意思是 unNATURAL,「正經翻譯」就是:沒上過 Nature。
這個項目一如既往地開源了,如果你也想復刻一下……
哦對了,是時候該揭曉 XUAN 的造價了——據大神本人不完全統計,超過 3 萬元(人民幣,約新台幣 13 萬元)。
不過,稚暉君也表示:
最終硬體成本來算的話應該不到一萬,就光達貴一點,主要還是試錯成本。
以及,劃重點,不售賣哈!
參考資料
(本文經 AI 新媒體量子位 授權轉載,並同意 TechOrange 編寫導讀與修訂標題,原文標題為〈华为天才少年造出自动驾驶单车!图纸已开源,硬件成本一万,B站老板:重新定义「自行」车〉。首圖來源:GitHub)
延伸閱讀
誰是未來自駕車市場的主導者?外媒預測:特斯拉勝率只有 5%
【不想輸 Google?】中國科技巨頭百度為什麼也加入自駕車建造行列?
臺南自駕車全速前進!自駕車上路不只是夢想



