
Abstract
This study shows fuel film measurements in a spark-ignited direct injection engine using refractive index matching (RIM). The RIM technique is applied to measure the fuel impingement of a high research octane number gasoline fuel with 30 vol% ethanol content at two intake pressures and coolant temperatures. Measurements are conducted for an alkylate fuel at one operating case, as well. It is shown that the fuel volume on the piston surface increases for lower intake pressure and lower coolant temperature and that the alkylate fuel shows very little spray impingement. The fuel films can be linked to increased soot emissions. A detailed description of the calibration technique is provided and measurement uncertainties are discussed. The dependency of the RIM signal on refractive index changes is measured. The RIM technique provides quantitative film thickness measurements up to 0.9 µm in this engine. For thicker films, semi-quantitative results of film thickness can be utilized to study the distribution of impinged fuel.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Future internal combustion (IC) engines have to meet stringent emission and efficiency targets, providing motivation for research efforts of advanced combustion engine concepts that have potential for higher efficiency than conventional engines. Since the engine is only one link in the chain of providing useful work, from a CO2 perspective, there is also motivation to examine the use of advanced fuels that are based on renewable resources and/or contribute to optimized refinery operations. Advanced fuels can also provide improved combustion characteristics, facilitating meeting efficiency and emission targets. This leads to the current investigation of an advanced combustion concept (i.e., stratified DISI operation) with new fuels (Drake and Haworth 2007; Fansler et al. 2015).
For stratified operation, wall wetting is an issue because the fuel has to be injected late in the compression stroke while the piston is relatively close to TDC. This can lead to fuel deposits on the piston surface which burn as diffusive flames during the expansion stroke causing increased smoke emissions. For homogenous (early-injection) operation wall wetting was linked to smoke emissions as well (Velji et al. 2010). Besides engine operating parameters, fuel properties are strongly influencing the spray characteristics and thus fuel deposits. This is why studies are conducted to link engine operation and fuel properties to engine emissions and performance (Karlsson and Heywood 2001; Drake and Haworth 2007; Serras-Pereira et al. 2015).
For an improved understanding and modeling, it is furthermore necessary to develop diagnostics to visualize and measure the complex processes within IC engines. One key parameter is to measure the spray-wall interaction, especially the spray impingement onto surfaces. In the past, multiple approaches have been developed to visualize those processes in optically accessible IC engines and link them to emissions (Stevens and Steeper 2001; Stojkovic et al. 2005; He et al. 2012; Johansen and Hemdal 2015).
To measure fuel film thicknesses, a variety of techniques are available (see Henkel et al. 2016 for a recent overview) of which laser induced fluorescence (LIF) and refractive index matching (RIM) are suitable for time-resolved, two dimensional measurements.
To quantify the amount of fuel deposited on the piston wall under stratified operation, fiber-based LIF measurements have been conducted by Park and Ghandhi (2005). Two dimensional, quantitative fuel film studies using LIF have been applied at ambient conditions (Alonso et al. 2010), vessels (Schulz et al. 2016; Pan et al. 2017) and rapid compression machines (Miyashita et al. 2016). Drawbacks of the method are that the spectral characteristics of the fuel have to be well-known, which is why usually non-fluorescing single component fuels are blended with fluorescing fluids. Depending on the fluorescence intensity, fuel film thickness in the range of 10 s micrometer can be measured (Geiler et al. 2017). The applicability to measurements with regular fuel blends in engines is limited due to imperfect co-evaporation, non-azeotrope mixtures, background signal of the fuel vapor, and pressure dependency of the LIF signal (Han and Steeper 2002; Lin and Sick 2002; Alonso et al. 2012).
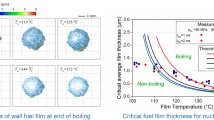
Refractive index-matched imaging was developed for high-speed two dimensional measurements of fuel film thickness, area and volume (Drake et al. 2003; Yang and Ghandhi 2007; Maligne and Bruneaux 2011). RIM measurements utilize the similarity of the refractive indices (n) of a liquid and glass (in contrast to the large difference in n between glass and a gas) to reduce the scattered light from a ground-glass substrate. However, the RIM effect is dependent on the illumination angle (α), as illustrated in Fig. 1a, b (see Fig. 1c for definition of α). In these examples, the same piston-bowl window is used, having one polished and one “ground” surface, with a liquid droplet applied to the center of the ground surface. In both cases, the light source and camera are on the same side (cf. Fig. 1c), and the camera captures the back-scattered light. Irrespective of α, the back-scattered light outside the liquid region appears diffuse and bright, and it has contributions from both scattering from structures on the order of the wavelength of light, and specular reflection from the randomly ground larger-scale surface structure. Since the incident light is at an angle α to the polished surface normal, the specular reflection from the polished surface is not collected by the camera. Therefore, only the diffuse back-scattered light from the ground surface is collected by the camera lens. If n of the liquid and glass are comparable and the liquid film is thicker than the irregularities of the ground surface, the light is mostly transmitted through the liquid-glass interface, with only smaller fractions of reflected and scattered light. When α is large, specular reflections at the liquid–gas interface do not reach the collection aperture of the camera lens, and the “wet” region appears dark (cf. Fig. 1a, region 1). As the liquid evaporates, the “peaks” of the ground surface are exposed, so that the intensity of the back-scattered light increases, causing the image to appear gray (Fig. 1a, region 2). This intensity variation with liquid thickness can be used to estimate the fuel film thickness if the backscattering-efficiency of the rough surface is known for a given optical setup. This effect is used for the RIM technique. The dynamic range of the thickness measurement is dependent on the depth of the surface roughness, which is why RIM is limited to thin films in the order of few micrometers.

Example of the refractive index matching technique with a large illumination angle—α ≈ 30° (a) and an example with illumination from a small angle—α ≈ 5° (b), schematic of a rough surface with applied liquid volume and illumination, showing a simplified sketch of the scattering at the glass–liquid–air interface and the liquid flow from higher to lower levels as discussed in Sect. 4.2 (c)
However, the angle of the incident light, α, has to be sufficiently large to avoid reflections at the liquid–gas interface back into the detection system. If α is small, specular reflections at the liquid–gas interface reach the collection aperture of the camera lens, and the “wet” region appears bright (Fig. 1b, region 3). Using such a small α, the formation of liquid films can still be detected and the wetted area quantified, but the film thickness cannot be determined. Thus, quantitative use of RIM requires the use of a large α.
The film thickness (or film height) determined by RIM should be understood as a measure of the local liquid volume per surface area. In other words, the determined height is the theoretical local film thickness that the same liquid volume would have on a flat surface. The actual height at which the liquid fills the roughness craters cannot be determined by RIM and the relation to the calculated film thickness is non-linear and dependent on the exact roughness distribution (Drake et al. 2003). When liquid is applied on a dry and rough surface, small amounts of liquid quickly fill the bottom of the roughness craters and the actual liquid level in the craters increases fast. The higher the actual liquid level is, the more liquid volume is needed to raise it further, because the projected surface area increases. Depending on the roughness structure, the maximum average measureable film thickness is much smaller than the roughness of the glass.
In the literature, the use of refractive index matching for fuel film measurements in an internal combustion engine was first shown by Drake et al. (2003). They investigated fuel films on the piston surface as a possible source of smoke and hydrocarbon emissions. Engine soot emissions were linked quantitatively to the liquid film mass on the piston, demonstrating that RIM is a promising technique to investigate cause and effect chains in IC engine combustion. However, their focus was not on the RIM technique itself, so the calibration is not described in detail. The paper does not either discuss some other effects on the RIM signal like surface roughness and refractive index properties.
Yang and Ghandi (2007) measured film thicknesses of diesel and Maligne and Bruneaux (2011) of isooctane/gasoline sprays in chambers for different ambient temperatures and densities. The diesel film heights were strongly dependent on ambient temperature, but were only slightly affected by ambient density. Here the calibration was described in detail, but the calibration was based on the assumption of a homogeneous film thickness distribution neglecting the non-linear dependency of the local film thickness on RIM signal intensity.
In this study, a calibration procedure is proposed which combines the advantages of the calibration procedures described in the above mentioned publications. We also investigate the influence of the liquid’s refractive index on the RIM signal and discuss possible error sources which extend the discussions in (Drake et al. 2003; Yang and Ghandhi 2007; Maligne and Bruneaux 2011). We then show results of the application of the technique to a direct injection spark-ignited (DISI) engine where the liquid deposits can be linked to increased soot emissions.
2 Experimental setup
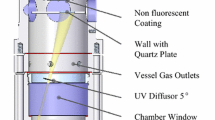
The engine used in this investigation is a single cylinder DISI engine equipped with a Bowditch extension and a drop-down cylinder. Engine parameters can be found in Table 1. The piston has a bowl with a flat bottom and closely located spark plug and injector to enable stratified operation (Fig. 2a). The engine can be operated in both all-metal and optical configurations. In this study, only the piston-bowl metal window blank is replaced by a quartz piston window enabling optical access while keeping the engine setup as close as possible to the metal configuration.

Cross-section of the engine (a) and experimental setup used for the RIM measurements (b)
Figure 2b shows the experimental setup used for the RIM measurements. The surface of the piston glass is illuminated by a continuous wave laser (532 nm, 90 mW, beam diameter: 1.2 mm). The laser beam is split by a 50/50 beam splitter and then the two beams are directed to the side of the piston mirror where they are reflected by two aluminum mirrors vertically into holes in the piston window retainer ring. Here, they are expanded and reflected by an acrylic deflector through the non-polished cylindrical portion of the piston window onto the rough piston surface. This design enables side illumination of the rough glass surface with a large incident angle (α), with illumination that is independent of the piston position. The laser intensity was sufficiently high that the exposure time could be limited to 300 µs (~ 2° crank angle (°CA) at 1000 rpm). The RIM signal was recorded using a high-speed camera (Phantom v710, Vision Research) with 180 mm camera lens (Sigma, f/2.8). The f-stop was set to f/6.7 to achieve a good compromise between depth of focus and signal intensity.
For the refractive index matching (RIM) measurements, the piston was equipped with a sandblasted quartz glass window. The roughness of the complete glass surface was measured using a confocal laser profilometer (SolarScan WLC 2, Solarius, 1.2 µm horizontal and 8 nm vertical resolution). Figure 3a shows a surface contour along the white line in Fig. 3b of the glass surface. The local surface roughness \({R_{\text{a}}}\) was calculated in sections of 2 × 2 mm2 to further quantify the homogeneity of the roughness. The surface-averaged mean value is \({R_{\text{a}}}\) = 6.3 µm and the relative standard deviation of the local surface roughness is 7.9%.

Profile of the surface roughness measurement along the white line indicated in the right figure (a), locally calculated surface roughness \({R_a}\) (b)
3 Calibration of the refractive index matching signal
To calculate the film height h on the piston surface from the RIM signal, a calibration is necessary to determine the dependency between intensity I and the local liquid volume per surface area. In this study, a calibration approach was chosen which is a combination of the techniques described in (Drake et al. 2003; Maligne and Bruneaux 2011). In this section, first, the technical procedure of the calibration is described. Then, the data used to determine the calibration polynomial is shown and the method to calculate the calibration polynomial is described. Finally, the uncertainty in film thickness calculations because of surface roughness variations and refractive index changes are discussed.
The calibration is done at room temperature with the engine at halt, using the same optical setup as for the engine tests. The piston and cylinder are lowered to enable an application of defined liquid volumes onto the rough glass surface. A droplet of known volume is applied to the rough piston window surface, using a mixture of high- and low-volatility liquids. The low-volatility liquid is the component used for the calibration, but without the high-volatility liquid, it would not spread sufficiently on the rough glass surface to create a sufficiently thin film. After the high-volatility liquid has evaporated, the low-volatility liquid is left behind, creating a small film thickness in the roughness craters, which are assumed to be unconnected for the most part.
The calibration was done using mixtures with varying proportions of isooctane and dodecane to adjust the average film thickness (see Table 2). The large difference in volatility is indicated by the difference in vapor pressure at room temperature (5.5 vs. 0.013 kPa @ 21 °C). Furthermore, for these mixture, no azeotrope behavior has been reported (Haynes 2015; Dortmund Data Bank 2017). Thus, a complete evaporation of isooctane from the mixture can be assumed. The mixtures were generated with the aid of a precision scale. For each calibration point, 0.6 µl of the mixture was applied onto the piston glass surface using a microliter syringe. The corresponding dodecane volume VD is specified in Table 2. Mixtures with a volume fraction yD > 0.2 and larger fluid volumes than 0.6 µl were not feasible, because the film thickness distribution became too inhomogeneous and locally too thick. The calibration recordings were conducted at room temperature and under normal atmosphere. Both calibration liquids evaporated completely from the glass surface at this conditions, but at very different rates as discussed below.
Figure 4 shows a selection of images with normalized intensity (using images of the dry piston) of a calibration recording and three line plots: a schematic of the combined evaporation process of the two calibration fluids, the average intensity evolution within the dashed rectangle and an intensity evolution of a selected pixel. The first image shows the moment when the liquid is applied with a microliter syringe (10 s, compare intensity plots for reference as well). After the application, the liquid spreads until it reaches its maximum spatial distribution and a minimum RIM signal intensity (13.5 s). The minimum signal intensity can be seen in the intensity plot of a single pixel in the bottom right plot in Fig. 4, as well. While the isooctane content of the mixture evaporates quickly, the intensity rises fast until only the dodecane fraction of the mixture is left (20 s). At this point, the slope of the intensity curve is drastically reduced. From then on, the remaining dodecane evaporates slowly.

Selected images of a calibration recording with normalized intensity (left images), schematic of the combined evaporation process of isooctane and dodecane (top), temporal intensity evolution for the spatially averaged intensity of the AOI indicated by the dashed rectangular (middle) and the intensity evolution of a single pixel (bottom)
To create different film heights for the calibration, different volume fractions of dodecane are applied while keeping the total liquid volume the same. The applied liquid spreads over the same area, but the dodecane volume which is left after the isooctane content has evaporated is different. In this way, different film thicknesses are achieved.
The raw images of each calibration recording are processed using a sequence of image-processing steps. First, an area of interest (AOI) is defined around the liquid (dashed rectangular in Fig. 4) and locally filtered using a Gaussian filter with a filter size of 12 pixels (corresponding to 0.7 mm). It was found that the choice of the filter size does not influence the film volume calculations or the calibration significantly. The images are pixel-wise normalized using images acquired before the liquid is applied. Small laser intensity fluctuations between images are corrected by dividing the resulting image intensity by the normalized average intensity in a 50 × 50 pixel2 area next to the AOI.
The next step is to analyze the intensity distribution after the isooctane fraction has evaporated and compare it to the applied dodecane volume to get a calibration function that connects the intensity distribution to a film thickness. The evolution of the area averaged intensity over time is very similar to that shown by Maligne and Bruneaux (2011). They used the average intensity after the isooctane is evaporated and related that to the applied volume per surface area. In this study an extended method is used. Instead of relating the average intensity to an average film volume, the intensity and the applied volume are evaluated on a single pixel basis for all pixels within the AOI. This method accounts for inhomogeneities of the intensity distribution and is not dependent on an intensity threshold to determine the liquid area. The extended method also accounts for the fact that the applied dodecane starts to evaporate before the isooctane is fully evaporated.
To take the co-evaporation of dodecane and isooctane into account, the following steps are followed for each calibration recording: First, the spatially averaged intensity evolution is analyzed (Fig. 4, middle line plot) and a temporal fit window is determined (indicated by the square marks), in which the intensity increase is starting to become linear. Then, the images are processed pixel by pixel (Fig. 4, bottom line plot). For each pixel, the temporal intensity change is fitted by a linear regression within the fit window. With the determined slope, the intensity \({I_0}\) at the start of the fit window (first square mark) is extrapolated to an image time halfway in between the start of liquid application (as determined by the time with the steepest negative slope of the intensity) and the end of isooctane evaporation (start of the fit window). This position is marked with a cross in the bottom line plot of Fig. 4. This is done for each pixel of the cropped calibration image and the result is an intensity distribution that corresponds to the applied (and thus known) dodecane volume.
From the resulting intensity distribution of multiple calibration recordings the calibration function \(h={c_0}+{c_1}I+{c_2}{I^2}\), with h being the local film thickness, I the measured local intensity and c the coefficients of the calibration function, is determined as described in the following. The coefficients were iteratively optimized by minimizing the overall difference of the applied volume \({V_{j,{\text{applied}}}}\) and calculated volume \({V_{j,{\text{calculated}}}}\) of each calibration case j:
\({V_{j,{\text{calculated}}}}\) is the calculated dodecane volume that results from applying the calibration function to the calibration images (with pixels i). Here, \({h_i}\) is the calibration function applied to a pixel and \(a\) is the surface area imaged by one pixel. \({V_{j,{\text{applied}}}}\) is the volume of dodecane that was applied to the piston glass using the microliter syringe. The last factor in Eq. (1) normalizes the residuum for the applied volumes. An artificial calibration point was added with \({V_{j,{\text{applied}}}}=0\) and I = 1, because the intensity does not change when no volume is applied. To avoid division by zero a constant \(k~ \ll ~{V_{j,{\text{applied}}}}\) was added to the last term in Eq. (1) which does not change the resulting polynomial coefficients. Overall, this approach of determining the calibration function accounts for inhomogeneous film thickness distributions of the calibration recordings and is not dependent on a threshold-based determination of the liquid area.
Figure 5 shows a histogram of the resulting pixel intensities whithin the AOI of the calibration cases. For high volume fractions of dodecane (yD), the location of peak frequency shifts to lower intensity. This is consistent with the intended increase of film thickness with increased fraction of dodecane, which causes less backscattering to the camera. The intensity distributions are fairly broad which is caused by the surface roughness and the inhomogeneous distribution of the liquid. The broad distributions are the primary motivation for the development of the pixel-wise analysis of the calibrations, as described above.

Histogram of all pixel intensities of the calibration cases (a), calibration polynomial (b) and comparison between applied and calculated liquid volumes of the calibration cases
Calibration cases with yD = 0.4 have been recorded as well, but they show a saturation effect at intensities of I = 0.2 because of overly thick fuel films, for which a further reduction of back-scattered light does not occur. This leads to a strong discrepancy between applied and calculated volumes for those cases. From this, it is concluded that the minimum intensity for which the calibration is valid occurs around I = 0.3. When calibration cases with intensities in the range of 1–0.3 are used, the calculated calibration volume matches well the known applied volume, as shown in Fig. 5c. Figure 5c also demonstrates good reproducibility of the volume calculations for all calibration cases. Figure 5b shows the optimized calibration polynomial. With a minimum acceptable I = 0.3, Fig. 5b indicates that 1.3 µm is the maximum film thickness for which the measurement is fully valid. It should be noted, that for a calculated film thickness of 1.3 µm, the actual liquid depth in the roughness craters is much greater, as explained after the discussion of Fig. 1. This explains why this window with \({R_{\text{a}}}\) = 6.3 µm enables valid measurements in the 0–1.3 µm range.
Calibration curves reported in the literature (Drake et al. 2003; Yang and Ghandhi 2007) are not as linear as the curve in this study. The reason for this is probably a different shape of the surface roughness and that these studies did not limit their calibration curve to film thicknesses without saturation effects.
The calculated calibration polynomial was compared to a second calibration polynomial which was determined using the simpler approach of Maligne and Bruneaux (2011). For this approach, an average film height is determined for each calibration recording by dividing the applied volume by the area of the applied liquid. The area was determined using a threshold of I = 0.95. A least-squares regression gives the polynomial coefficients. The average deviation between the two calibration functions is only 0.9% despite the inhomogeneous intensities. The similarity of the calibration polynomials is attributed to the quite linear slope of the calibration polynomial—the difference might be larger for setups that show stronger non-linearity. Nevertheless, within this study, the calibration polynomial which was determined on a single pixel basis is used.
3.1 Influence of surface roughness
For the refractive index matching measurements, the dynamic range of the film thickness measurement is determined by the magnitude of the surface roughness. The maximum film thickness for valid measurements increases with the surface roughness. The reason for this is that the craters of a surface with a small roughness height are completely filled with liquid at smaller fluid volumes. Thus, the local deviation of the roughness influences the accuracy of the local film thickness calculation. The standard deviation of the local roughness is 7.9% of the mean roughness (Fig. 3). Assuming that the function in Fig. 3b scales linearly with the roughness magnitude, this value could be used to estimate the uncertainty due to roughness inhomogeneities, which is then similar. The linear shape of the calibration curve in this study supports this assumption.
For the volume calculation, the uncertainty from local variations in roughness is much smaller, since both the calibration and the measurements are statistical values from a large sample number (the volume is calculated over an area with different roughness values). Thus, it is expected that the local deviation of roughness does not contribute to a strong systematic error of the volume measurement.
3.2 Influence of refractive index changes
It is expected that the film height determination will be affected by differences in refractive index between the calibration liquid and the fuel. Previous publications on RIM do not further discuss the refractive index as a possible error source (Drake et al. 2003; Yang and Ghandhi 2007; Maligne and Bruneaux 2011). In this study, a brief quantitative analysis of the influence of the refractive index on the measured RIM signal intensity is conducted. In Table 3, the refractive indices of the used fuels, representative fuel components, the hydrocarbons used for the calibration, the glass window and air are listed. The refractive indices of the E30 and Alkylate fuels have been measured at room temperature using a digital refractometer (VEE GEE MDX-101). The refractive indices of fused silica and fuel components do not match perfectly but are very close, as compared to the large difference between air and glass.
The more the refractive index of the liquid deviates from the glass the less effective the matching will be, thus leading to less intensity decrease when the liquid is applied. Therefore, the apparent film thickness with a strongly deviating refractive index is smaller, compared to a fuel film with better matching refractive index. This might lead to a systematic error, because the calibration is done with dodecane, which has a higher refractive index than most of the fuel components.
To check how strong this effect is, hydrocarbon liquids with different refractive indices were applied to the piston glass using a microliter syringe. The intensity of the liquid films were evaluated shortly after the application, when the film thickness was still larger than the roughness. Figure 6 shows the influence of a refractive index mismatch on the relative intensity. To match the refractive index of the quartz glass, a mixture of toluene and n-heptane was used. The more the refractive index of fluid and glass deviates, the higher the intensity difference is. This is true for both higher and lower refractive indices.

Influence of the refractive index of the liquid on the relative intensity of the RIM signal
To estimate how much the refractive index might deviate between calibration and the measurements in the engine two things have to be considered. First, the deviation of refractive index of the calibration liquid (dodecane) and the fuel. The fuel component with the biggest deviation is ethanol which has a quite small refractive index of n = 1.36. Nevertheless, the E30 fuel has a refractive index of 1.40 because of its aromatic hydrocarbon content. Second, the temperature dependency of the refractive index has to be considered. The refractive index of hydrocarbons is temperature-dependent in the order of − 4.5 × 10−4 K−1 (Wen et al. 2014). The temperature dependency in the case of fused silica is small compared to the organic liquids (Toyoda and Yabe 1983). Using those values, the change in refractive index due to temperature changes of 100 K will be Δn = − 0.045.
Since the calibration is done at room temperature with dodecane, the possible deviations of the RIM signal in the engine measurements due to refractive index changes are estimated in the following. First, the different refractive indices of the liquids are considered. The measured fuel refractive index with the biggest deviation to fused silica is Alkylate with n = 1.391. This results in a refractive index deviation compared to the calibration with dodecane of ΔnFuel = − 0.034. This is a very conservative estimation, because in the engine light components will evaporate first causing the refractive index to increase. The second influence on a refractive index deviation is the temperature. A precise estimation is difficult, but assuming that the maximum temperatures will be below the boiling temperature of the fuel components at elevated pressures during compression, the maximum fuel temperature will be about 200–250 K higher than during the calibration. Using the findings in (Wen et al. 2014), this would cause a change in refractive index of about ΔnTemp. = − 0.10. The resulting combined deviation of refractive index is Δn = − 0.13. This can be used to calculate an estimated maximum deviation in RIM signal intensity between calibration and engine measurement using the fit in Fig. 6. The resulting change in RIM intensity is ΔI = 0.11 and would lead to an underestimation of the fuel film height of as much as 0.24 µm or 15% referenced to the maximum film height in the calibration of about 1.6 µm. This is a rough estimate with large uncertainties, but it still contributes to the understanding of the expected errors of this technique. It can be considered a worst-case estimate, because fuel film temperatures cannot be higher than the boiling points and with evaporation of the lighter, more volatile fuel components, the refractive index of the fuel will approach the refractive index of the calibration fluid (dodecane).
4 Results
In this study, the RIM technique is applied to measure the fuel impingement of a high research octane number (RON = 98) gasoline fuel with 30 vol% ethanol content at two intake pressures and coolant temperatures. Measurements have been conducted for an alkylate fuel at one operating case, as well. Table 4 provides selected properties for these two fuels.
Engine performance tests with a metal engine configuration show that there is a strong difference in soot emissions between those operating points. To investigate if those soot emissions can be linked to fuel films on the piston surface, the RIM technique is applied to measure the fuel film volume at the piston surface. The measurements are also used to discuss the limits of a quantitative film thickness determination in Sect. 4.2.
In Table 5, the operating cases are listed. Cases A–D were run with injection only (non-fired cases), whereas cases Af, Bf and Df were run with ignition and combustion (fired cases). For case C, no fired operating case was recorded. Since the piston window becomes dirty very quickly when run with combustion, these cases are used as engine performance tests and to compare the spray patterns qualitatively with the non-fired cases. Between cases A and B, the intake pressure was changed and the injected mass adjusted by changing the injection duration to maintain a nearly constant supplied fuel/air mass ratio that corresponds to ≈ 0.39. The injected fuel mass and the injection timing are the same as for the fired engine performance tests. Case C was run with a lower coolant temperature TCoolant = 60 °C to demonstrate an operating case with thick fuel films that are reaching the measurement limits. This case also demonstrates the influence of low engine temperatures (e.g., during cold start) on wall wetting. The spray pattern of the third fired cycle and the following, injection-only cycle of the fired cases were compared with the non-fired operating cases. To achieve similar fuel films and compensate for the lower wall temperatures in non-fired operation, the coolant temperature was increased from 75 to 90 °C for cases A, B and D.
Table 6 lists the cycle sequences used for non-fired and fired operating cases. For the non-fired engine tests, the engine was operated in a skip cycle with five cycles without injection followed by a cycle with injection. The last non-injection cycle was used as a reference to normalize the intensity of the following injection cycle. It was found that for the non-fired cases, the windows did not show any fouling and the fuel from the previous cycle was fully evaporated before the next cycle started. For the fired optical engine tests, the engine was operated with a skipfire scheme with three fired cycles, followed by one motored cycle with injection and one cycle without injection as a reference cycle. The following seven cycles without injection and ignition were used to achieve a duty cycle of 25% (3 fired out of 12) to avoid high thermal loads. Those cycles were not recorded. Images were acquired every second crank angle from start of injection (SOI) to 100 °CA later resulting in 50 images per cycle. For each operating case, 20 cycles of each type (injected, fired, reference) have been recorded and evaluated.
4.1 Refractive index matching measurements
In this section, the results of the RIM measurements of the four operating cases are shown after the post-processing steps are briefly explained. A crank angle specific mask was applied to the raw images to mask out reflections and limit the evaluated area to the piston-bowl window surface. The images are filtered (12 pixel filter size) and normalized using the reference images from the cycle before. The film thickness for each pixel is calculated within the specified area by applying the calibration function to each individual pixel in the normalized images. The fuel volume is then calculated by multiplying the sum of the film heights of each pixel with the °CA specific pixel area size. The pixel area size was determined by target images. Additionally, the film area is extracted by applying a threshold-based binarization using h = 0.1 µm (I = 0.94) as a threshold and the spatially averaged film height within this region is calculated.
Figure 7 shows sequences of normalized images and film height distributions at selected crank angle degrees. The left-most column shows normalized images of the fired reference case Bf, the next column contains images of a cycle without ignition of the same operating case. The third column contains images of a selected cycle of the corresponding non-fired case B and the last column shows the corresponding film thickness distribution of the latter cycle. SOI is at − 31 °CA and the first image shown is 3 °CA later. The leading edges of the fuel sprays have reached the piston by that time and the fuel sprays are visible in the background. The intensity level of the spray in the background leads to negative calculated film heights, which is obviously incorrect and thus the film thickness calculations cannot be evaluated as long as there is Mie-scattering from droplets above the piston surface. Mie-scattering from droplets comes to an end at about 11 °CA after SOI (− 20 °CA aTDC) which roughly corresponds to the sum of the duration that the spray needs to reach the piston and the injection duration. At − 20 °CA, the liquid film pattern has its maximum area. In the fired case, a strong luminescence is apparent at the spark plug location where the early flame starts to develop.

Normalized images of selected cycles and °CA of the fired case Bf (left), cycle without ignition of the same fired case Bf (second), motored case B (third) and corresponding film height distribution of motored case B with calculated volume (right). The gray line indicates the applied mask of the piston window. Coolant temperatures are noted at the bottom
At top dead center (TDC), the fired case luminosity is so strong that the film pattern is not visible. The non-fired cases show a slight reduction in fuel film area and the volume decreases as well. The last images shown are for 24 °CA, and the fired case still shows significant luminosity. There is still a bright, blurry combustion luminosity spot in the top left corner, but fine flame structures at locations of fuel films are also visible. Since the rough surface of the glass makes objects away from the surface appear blurry, it is assumed the resolved flame structures burn close to the piston surface as pool fires. The evaporation after TDC leads to a continued reduction of film area and height. The fuel does not evaporate completely within the 100 recorded °CA range for the B and Bf cases shown in Fig. 7. Even so, no fuel is observed in subsequent cycles.
The comparison of the fired and the non-fired film patterns reveals very similar distributions. This is not the case when the coolant temperature is not adapted to account for the different wall temperatures between fired and non-fired operation. Nevertheless, it is assumed that the evaporation of the fuel film in the non-fired cases is different from the fired cases, because of the changed temperature and pressure within the cylinder and piston surface. Thus, the fuel film evaporation during the expansion stroke is not necessarily representative of the fired engine operation.
The film volume, area and spatially averaged film height evolution of cases A to D are displayed in Fig. 8. For all cases, the film volume shows negative values during the injection because of the bright background signal. First, the effect of intake pressure will be discussed for cases A and B. For both cases A and B, maxima of film volume are reached as soon as the spray has fully impacted the surface. Highest volume is found for case B which has a low intake pressure \({p_{{\text{in}}}}\) = 100 kPa. The higher intake pressure \({p_{{\text{in}}}}\) = 130 kPa of case A results in a smaller volume of fuel applied, although a significantly higher amount of fuel is injected to achieve the same stoichiometry. Apparently, the increased gas density outweighs the longer injection duration.

20-Cycle average film height distribution at − 20 °CA for the different operating cases with the dotted line indicating the border of the area determination (top row). Film volume (second row from top) and area evolution (second row from bottom) and surface-averaged film height within the determined film area (bottom row). The end of injection is indicated with the gray dashed line. End of spray impingement was at − 20 °CA
The surface area evolution shows a similar area for cases A and B at − 20 °CA although the volume is different. The reason for this is that local film thicknesses are higher for case B and the fuel is located in distinct puddles. For case A, the last part of the spray plumes arriving at the piston collapse and change the direction of the spray plumes towards the center. Thus, the fuel is spread over a larger semi-continuous area and average film thicknesses are smaller. This might explain the higher decay rates of the film area for case A, where a smaller amount of fuel evaporates on a similar area compared to case B. Looking at the spatially averaged film height (evaluated within the detected film area of each cycle) of case A and B, it can be seen that the average film height increases after the end of spray impingement and until TDC. This may appear counterintuitive, but analysis of the data shows that it can be explained by quick evaporation of wetted areas that have thin fuel films, increasing the statistical average thickness of the remaining film area. This effect can be seen in the difference between the volume and area evolution of case B as well, where the volume decreases only slowly, while the area decreases quickly.
Case C, with a 30 °C lower coolant temperature, shows nearly twice as much fuel impingement compared to case B, both in volume and area. This is consistent with the expected reduction of in-cylinder wall and gas temperatures. However, the volume evolution shows an unphysical behavior, where the volume increases in the − 20 to − 10 °CA range, although the spray impingement has already finished. This effect will be discussed in Sect. 4.2.
Lastly, Fig. 8 shows that the alkylate fuel case D exhibits very small film volumes. This can partly be explained by its lack of higher-boiling point components, see Table 4, which leads to a more complete evaporation of the spray before it reaches the piston surface. Furthermore, Table 4 shows that Alkylate’s heat of vaporization for a given stoichiometry is only half of that of E30, which likely contributes substantially to higher in-cylinder gas temperatures and decreased wall wetting. The shorter injection duration required to maintain a fixed stoichiometry may also contribute to the reduction of wall wetting, see Table 5.
Table 7 shows the injected fuel volume for each case and the corresponding measured fuel film volume at − 20 °CA. For the E30 cases, a significant fraction of the fuel is deposited on the piston, especially for case C with a combination of low intake pressure and low coolant temperature. This is different for the Alkylate cases where only a minor fraction of the injected fuel is measured at the piston surface. The measured smoke emissions of the corresponding fired runs show the same trend. For case B, the filter smoke number (FSN) is tripled compared to case A, consistent with an increased fraction of fuel being deposited onto the piston-bowl window. Further, the smoke emissions of the naturally aspirated alkylate case D is one order of magnitude lower compared to the corresponding E30 case B.
The measured fuel film volumes show a high correlation with measured smoke emissions and thus link the soot emissions to fuel films as shown previously in a wall-guided stratified-charge engine by Drake et al. (2003). This is strongly corroborated by the location of flame luminosity patterns of the fired runs. Since flame structures appear blurrier the further away they are from the rough glass surface, only flames close to the glass surface are imaged sharply. Sharp elongated flame structures are visible for the E30 cases around the location of the spray patterns as highlighted in Fig. 7. These pool fires are expected to increase the soot production, making them an important pathway of overall soot. This is not the case for the alkylate cases where fuel deposits are so small that they evaporate before they can burn as pool fires, whereas the fuel film of the E30 cases burn late into the expansion stroke. Consistent with this, the soot emissions of case D are an order of magnitude lower than E30 case B. However, it should be noted from Table 4 that the Alkylate contains very little aromatic compounds, which likely contributes to the low smoke production as well.
Reexamining Fig. 8, it is interesting that the fuel film area of case A and B are very similar after the end of spray impingement, while the volume is greater for case B. This leads to higher evaporation rates for case A, while in case B, the relatively thick fuel film regions remain longer during the expansion stroke. This is an explanation for the lower soot emissions of case A.
4.2 Apparent volume increase after end of spray impingement
In Fig. 8, the volume evolution of case C is shown. After a steep rise of measured liquid volume until the end of spray impingement at − 20 °CA, the volume keeps increasing which is unphysical since no further spray impingement onto the piston surface is occurring. This behavior is counterintuitive and needs some discussion, as it can also be found in past publications using RIM (Drake et al. 2003; Maligne and Bruneaux 2011), there in even more severe form. There are possible explanations for this behavior which will be assessed in the following:
-
a)
If this measurement of an increasing volume was correct, it would mean that somehow further liquid is deposited. The only possible explanations are condensation of fuel from the saturated gas phase at the cool piston surface or convective transport of further spray droplets to the piston surface. These effects are unlikely and not contributing to an additional liquid volume, especially since the film area is decreasing rapidly while the film volume increases (Fig. 8), which would not be the case if additional fuel is deposited at the piston surface.
-
b)
Another possibility is that the fuel contains bubbles, either from the impingement or from boiling of light components. This would lead to stronger light scattering and thus a brighter signal and lower film thickness measurement. If those bubbles disappear, the signal becomes darker and the film thickness measurement will show higher values. This hypothesis is also unlikely, since it would be visible for cases with less fuel impingement as well.
-
c)
Furthermore, the volume measurement might be affected by refractive index changes. When the fuel has impinged the piston, light components with lower refractive indices will evaporate first, leading to an overall higher refractive index. Since the fuel volume will decrease simultaneously, this secondary effect cannot explain a volume increase.
-
d)
The most likely explanation is that fuel heights are locally higher than the maximum film height that can be measured accurately. In other words, saturation of the signal below I = 0.3 may occur locally towards the end of the spray impingement event. The effect of an apparently increasing volume, which is caused by a decreased intensity might be caused by fuel being transported from plateaus into roughness craters, or between roughness craters of different size. Since the minimum intensity of the RIM signal is reached for filled roughness craters, a transport of fuel from such a region to a deeper, partly filled crater, will not affect the signal of the filled crater as much as the signal from the partly filled crater. In sum, this will lead to a decreased intensity signal and higher calculated film thickness. Since the roughness structures are small (~ 1 µm), the timescales at which this can happen (~ 100 µs) are sufficient that a flow between these structures can be fast enough (1 µm/100 µs = 0.01 m/s). This local redistribution is schematically illustrated in the schematic sketch of Fig. 1c, region 4.
When assessing those explanations, it should kept in mind that the increasing volume effect occurs for local film thicknesses above ~ 0.9 µm (compare Fig. 8). The corresponding area measurements follow a different trend, similar to the one of case A (with smaller film heights). This makes (d) the best suited explanation. The dynamic nature of this effect is not accounted for in the calibration which is why the determined height limit from the calibration has to be revised for this effect.
The histograms of the measured film heights shown in Fig. 9 corroborate explanation (d). Figure 9 shows the histograms of the measured film thicknesses of cases A, B and C for selected crank angle degrees after spray impingement. It can be seen that from − 18 °CA to top dead center a strong decrease at film heights < 0.6 µm takes place for all three cases, but most pronounced for case A. For case A, this behavior can be fully explained by ongoing vaporization. In contrast, for cases B and C, the frequency of thicker (> 1 µm) measured film heights increases. This is especially true for case C where it seems like a redistribution of measured film heights from lower values to higher values takes place.

Histograms of the measured film thicknesses for cases A, B and C at selected °CA
For case C, there is a strong peak at 1.1 µm at TDC with a steep slope for even thicker films which indicates that film heights > 1.1 µm are not measured correctly. Instead, the saturation at these intensity levels causes film heights > 1.1 µm to be shifted to lower values. As outlined in (d) above, it is assumed that for case C, with a lot of spray impingement, a high number of roughness craters are filled, while some bigger roughness craters next to the filled ones are not filled completely. Since these structures are below the resolution of the camera, the local redistribution of fluid from the filled, saturated craters to the unfilled craters causes the local intensity to drop. This drop in intensity leads to higher calculated film heights (see also schematic sketch in Fig. 1c, region 4). When the local fuel volume is so large that the redistribution of liquid causes the number of saturated regions to increase instead of decrease, a peak appears at high film height levels (here at 1.1 µm). In contrast, for small film heights (< 1 µm), local fluid redistribution becomes much less pronounced, because the roughness craters are generally not completely filled. Hence, case A does not show increased average liquid volume in the crank angle range − 20 to − 5 °CA, like case C does in Fig. 8. Since a quantitative assessment of these effects is not possible, the fuel volume measurements in the running engine have to be considered semi-quantitative when the calculated film thickness exceeds 0.9 µm for the given setup.
5 Conclusion
Within this study, engine tests were performed for two fuels and with three different operating conditions to demonstrate the method and investigate the influence of spray impingement on smoke emissions. Local film thicknesses of up to 1.1 µm were measured. It was shown that increased volumes of deposited fuel volume correlate with increased soot emissions, indicating the importance of pool fires, as previously demonstrated by RIM and allied measurements in a wall-guided stratified SI engine by Drake et al. (2003) and Stojkovic et al. (2005). Spray impingement was strongly affected by the engine coolant temperature, leading to a strong spray impingement for cold start conditions. Furthermore, engine tests with and without combustion reveal differences in wall wetting. For example, to match the wall wetting of skip-fired operation with a 25% duty cycle, a non-fired condition had to be operated with 15 °C higher coolant temperature.
It was observed that spray impingement decreased for boosted operation, despite the use of an increased injection duration required to maintain a constant supplied equivalence ratio. This highlights the importance of in-cylinder density on the spray penetration.
A new calibration procedure for RIM measurements was shown which accounts for local inhomogeneity of the calibration liquid distribution and co-evaporation effects of the calibration liquids. An optical setup was developed to achieve an even illumination of the rough window from two directions simultaneously regardless of piston position, here using a CW laser. This setup is also suitable for pulsed laser operation enabling higher temporal discretization and signal levels in future experiments. The paper assesses uncertainties and error sources of the RIM technique. It was shown that refractive index mismatch between the calibration liquid and the fuel in use (due to composition and temperature differences) can cause a worst-case underestimation of film thickness of up to 15%. It was also shown that the maximum film thickness that can be measured is much smaller than the roughness of the window and that film thickness above 0.9 µm have to be considered semi-quantitative. For future experiments, the diagnostics can be used to study effects of operating conditions on deposited fuel volumes and the local fuel distribution.
References
Alonso M, Kay PJ, Bowen PJ, Gilchrist R, Sapsford S (2010) A laser induced fluorescence technique for quantifying transient liquid fuel films utilising total internal reflection. Exp Fluids 48:133–142. https://doi.org/10.1007/s00348-009-0720-8
Alonso M, Kay PJ, Bowen PJ, Gilchrist R, Sapsford SM (2012) Quantification of transient fuel films under elevated ambient pressure environment. Atomiz Spr 22:79–95. https://doi.org/10.1615/AtomizSpr.2012004865
Dortmund Data Bank (2017) http://www.ddbst.com
Drake MC, Haworth DC (2007) Advanced gasoline engine development using optical diagnostics and numerical modeling. Proc Combust Inst 31:99–124. https://doi.org/10.1016/j.proci.2006.08.120
Drake MC, Fansler TD, Solomon AS, Szekely GA (2003) Piston fuel films as a source of smoke and hydrocarbon emissions from a wall-controlled spark-ignited direct-injection engine. SAE Technical Paper 2003-01-0547. https://doi.org/10.4271/2003-01-0547
Fansler TD, Reuss DL, Sick V, Dahms RN (2015) Combustion instability in spray-guided stratified-charge engines: a review. Int J Engine Res 16:260–305. https://doi.org/10.1177/1468087414565675
Fioroni G, Fouts L, Christensen E, McCormick R (2017) Heat of vaporization measured at NREL. Private communication
Geiler JN, Grzeszik R, Quaing S, Manz A, Kaiser SA (2017) Development of laser-induced fluorescence to quantify in-cylinder fuel wall films. Int J Engine Res 184:146808741773386. https://doi.org/10.1177/1468087417733865
Han D, Steeper RR (2002) Examination of iso-octane/ketone mixtures for quantitative LIF measurements in a DISI engine. SAE Technical Paper 2002-01-0837. https://doi.org/10.4271/2002-01-0837
Haynes WM (ed) (2015) CRC handbook of chemistry and physics: a ready-reference book of chemical and physical data. CRC Press, Boca Raton
He X, Ratcliff MA, Zigler BT (2012) Effects of gasoline direct injection engine operating parameters on particle number emissions. Energy Fuels 26:2014–2027. https://doi.org/10.1021/ef201917p
Henkel S, Beyrau F, Hardalupas Y, Taylor, A M K P (2016) Novel method for the measurement of liquid film thickness during fuel spray impingement on surfaces. Opt Express 24:2542–2561
Johansen LCR, Hemdal S (2015) In cylinder visualization of stratified combustion of E85 and main sources of soot formation. Fuel 159:392–411. https://doi.org/10.1016/j.fuel.2015.07.013
Karlsson RB, Heywood JB (2001) Piston fuel film observations in an optical access GDI engine. SAE Technical Paper
Lechner MD (1996) Refractive indices of organic liquids, 38B. Springer, Berlin/Heidelberg
Lin M, Sick V (2002) Mixture evaporative characteristics prediction for LIF measurements using PSRK (predictive Soave-Redlich-Kwong) equation of state. SAE Technical Paper 2002-01-2750. https://doi.org/10.4271/2002-01-2750
Maligne D, Bruneaux G (2011) Time-resolved fuel film thickness measurement for direct injection SI engines using refractive index matching. SAE Technical Paper 2011-01-1215. https://doi.org/10.4271/2011-01-1215
Miyashita K, Tsukamoto T, Fukuda Y, Kondo K, Aizawa T (2016) High-speed UV and visible laser shadowgraphy of GDI in-cylinder pool fire. SAE Technical Paper 2016-01-22165. https://doi.org/10.4271/2016-01-2165
Pan H, Xu M, Hung D, Lv H, Dong X, Kuo T, Grover RO, Parrish SE (2017) Experimental investigation of fuel film characteristics of ethanol impinging spray at ultra-low temperature. SAE Technical Paper 2017-01-0851. https://doi.org/10.4271/2017-01-0851
Park S, Ghandhi JB (2005) Fuel film temperature and thickness measurements on the piston crown of a direct-injection spark-ignition engine. SAE Technical paper 2005-01-0649 2005. https://doi.org/10.4271/2005-01-0649
Schulz F, Samenfink W, Schmidt J, Beyrau F (2016) Systematic LIF fuel wall film investigation. Fuel 172:284–292. https://doi.org/10.1016/j.fuel.2016.01.017
Serras-Pereira J, Aleiferis PG, Richardson D (2015) An experimental database on the effects of single- and split injection strategies on spray formation and spark discharge in an optical direct-injection spark-ignition engine fuelled with gasoline, iso-octane and alcohols. Int J Engine Res 16:851–896. https://doi.org/10.1177/1468087414554936
Stevens E, Steeper RR (2001) Piston wetting in an optical DISI engine: fuel films, pool fires, and soot generation. SAE Technical Paper
Stojkovic BD, Fansler TD, Drake MC, Sick V (2005) High-speed imaging of OH* and soot temperature and concentration in a stratified-charge direct-injection gasoline engine. Proc Combust Inst 30:2657–2665. https://doi.org/10.1016/j.proci.2004.08.021
Toyoda T, Yabe M (1983) The temperature dependence of the refractive indices of fused silica and crystal quartz. J Phys D Appl Phys 16:L97–L100. https://doi.org/10.1088/0022-3727/16/5/002
VDI e.V (2013) VDI-Wärmeatlas. Springer, Berlin/Heidelberg
Velji A, Yeom K, Wagner U, Spicher U, Rossbach M, Suntz R, Bockhorn H (2010) Investigations of the formation and oxidation of soot inside a direct injection spark ignition engine using advanced laser-techniques. SAE Technical Paper 2010-01-0352. https://doi.org/10.4271/2010-01-0352
Wen Q, Shen J, Gieleciak R, Michaelian KH, Rohling JH, Astrath NGC, Baesso ML (2014) Temperature coefficients of the refractive index for complex hydrocarbon mixtures. Int J Thermophys 35:930–941. https://doi.org/10.1007/s10765-014-1604-6
Yang B, Ghandhi J (2007) Measurement of diesel spray impingement and fuel film characteristics using refractive index matching method. SAE Technical Paper 2007-01-0485. https://doi.org/10.4271/2007-01-0485
Acknowledgements
Carl-Philipp Ding performed these engine experiments during a research visit to Sandia. Carl-Philipp Ding and Benjamin Böhm gratefully acknowledge financial support by Deutsche Forschungsgemeinschaft (DFG) through SFB-Transregio 150. The engine experiments were conducted at the Combustion Research Facility, Sandia National Laboratories, Livermore, CA as part of the Co-Optimization of Fuels and Engines (Co-Optima) project sponsored by the U.S. Department of Energy (DOE) Office of Energy Efficiency and Renewable Energy (EERE), Bioenergy Technologies and Vehicle Technologies Offices. Sandia National Laboratories is a multi-mission laboratory managed and operated by National Technology and Engineering Solutions of Sandia, LLC., a wholly owned subsidiary of Honeywell International, Inc., for the U.S. Department of Energy’s National Nuclear Security Administration under contract DE-NA0003525. Xu He contributed to this study during a sabbatical visit to Sandia, which was supported financially by the China Scholarship Council under Grant no. 201506035029.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ding, CP., Sjöberg, M., Vuilleumier, D. et al. Fuel film thickness measurements using refractive index matching in a stratified-charge SI engine operated on E30 and alkylate fuels. Exp Fluids 59, 59 (2018). https://doi.org/10.1007/s00348-018-2512-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-018-2512-5