Raven (Trabajo de Alumno)
Raven. Presentación
Mostrar un trabajo bien ejecutado es digno de orgullo.
poder explicar el proceso que te ha llevado a terminarlo exitosamente es aún mejor.
Pero suele necesitarse mucha práctica y constancia para retener lo aprendido, y se necesita más esfuerzo si hay que explicarlo.
Por mi parte no puedo tener más que gratitud a los alumnos que acceden, no solo a mostrar sus trabajos, sino que también se embarcan en la tarea de explicarlos.
Con la esperanza de que sirva de fuente de partida para muchos otros trabajos aún más exitosos y aún más complejos para explicar, ahora presentamos un trabajo de la mano de Izan Jimenez Jaime.
Con ustedes El robot Raven.
Aleks

Motivación
Mi motivación para hacer este proyecto era poder conseguir un modelo 3D comparable a los de los estudios de animación de un personaje hecho por mi y mi grupo de amigos.
He pasado meses haciendo este robot para un proyecto personal de animación donde teníamos ya varios modelos y queríamos tener los nuestros propios, decidí modelar este robot primero porque mi fuerte son los robots por el tipo de proyectos que he hecho yo mismo.
El software que has usado para el trabajo
3ds Max, Adobe Substance Painter, Blender
He utilizado substance painter para hacer las texturas del modelo y del fondo porque podía conseguir mejores resultados que usando sólo 3ds max y me resultaba más cómodo, y blender para adaptar otros modelos a 3ds max y usarlos de referencia.
Referencias
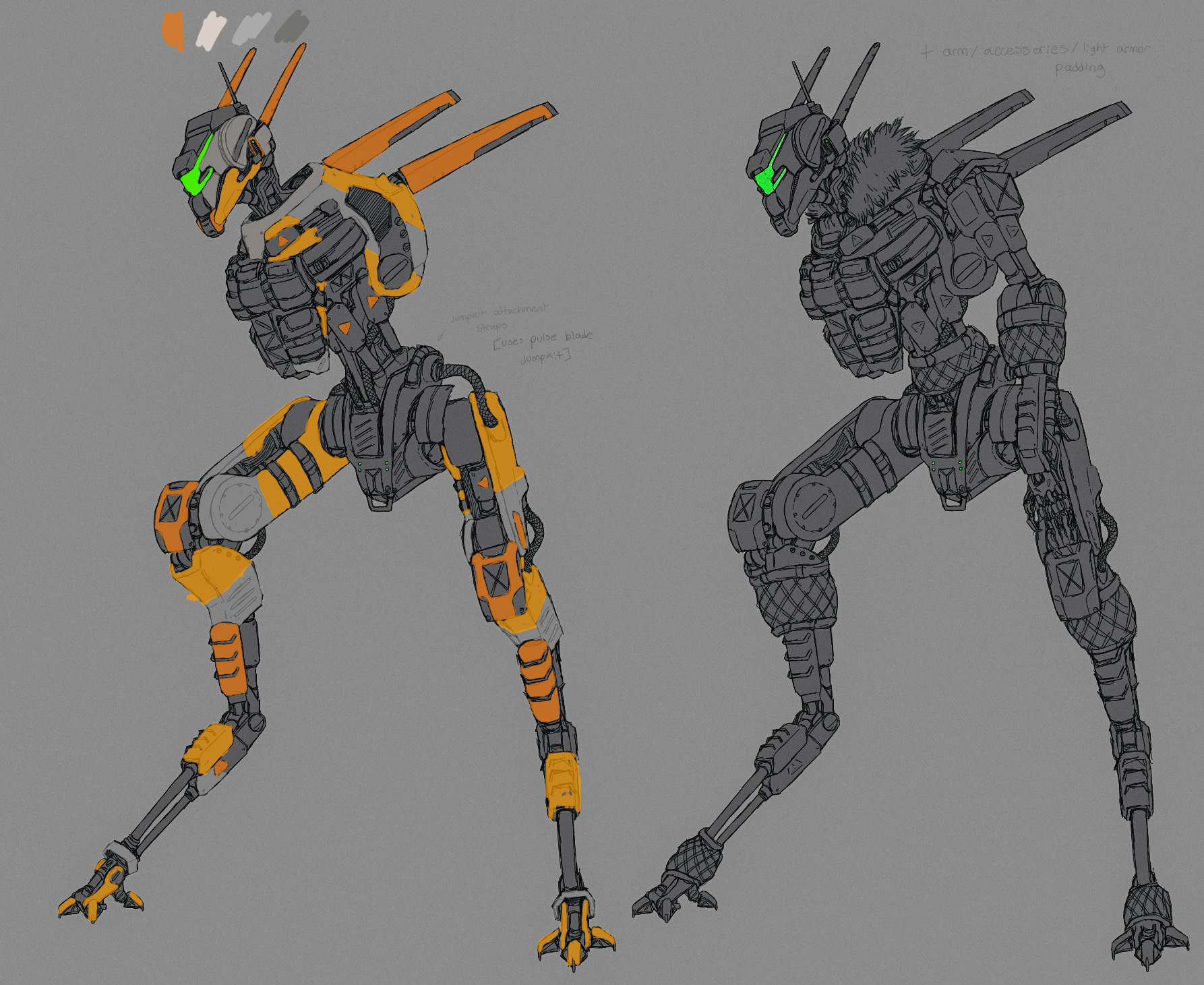
Tenía como referencias para el diseño del robot, algunos dibujos de otros personajes de videojuegos o películas e incluso robots de verdad


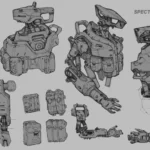


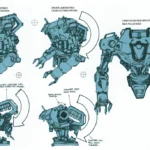

Plantilla (model sheet)
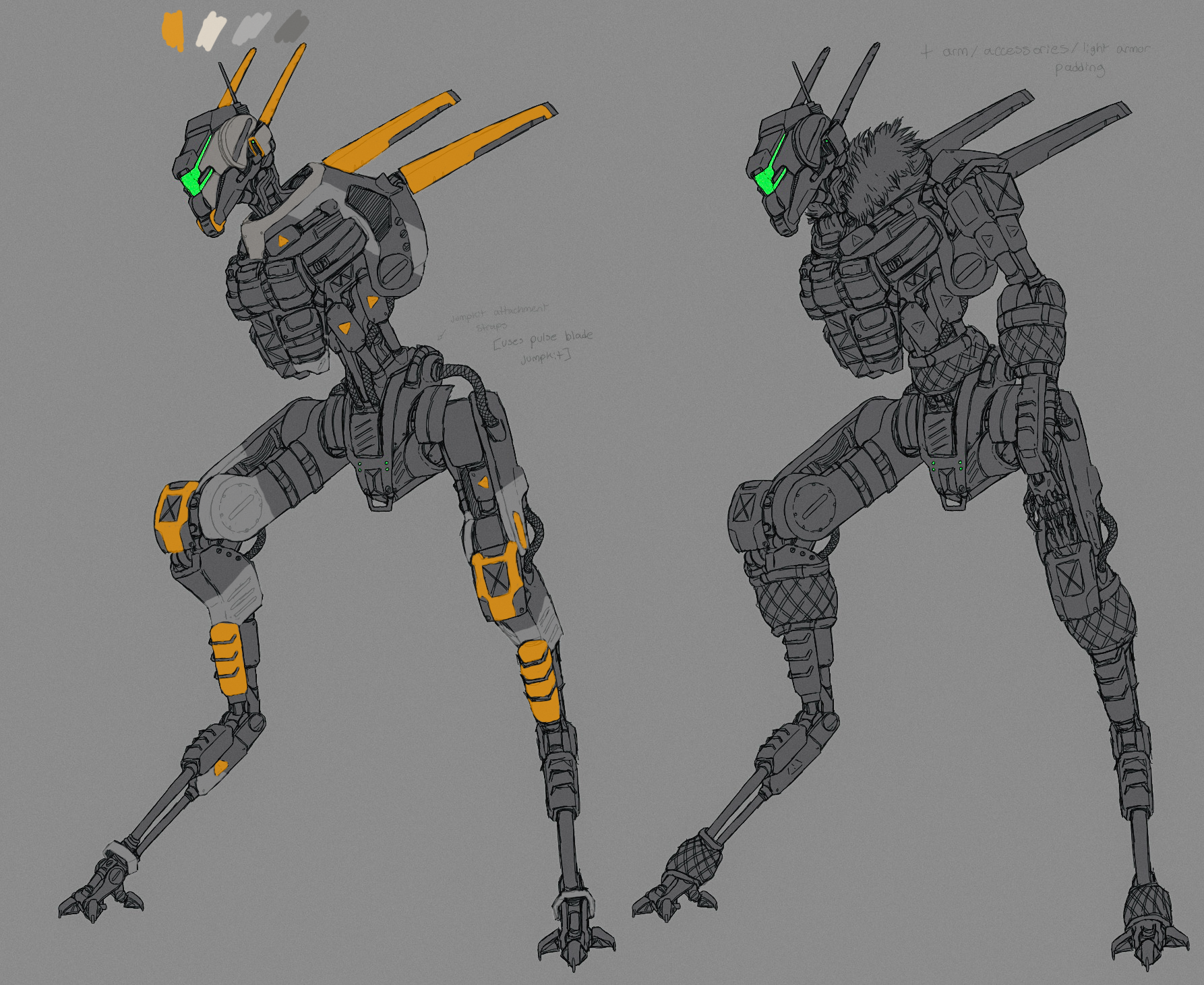
Tenía un dibujo general del diseño que quería al final (ambos hechos por un amigo) al que le hice unas notas por encima para aclarar algunos diseños de piezas mecánicas y un esbozo que usé para las proporciones del modelo. La mayoría de diseños de mecanismos están basados en algunos que conozco de la vida real, he cambiado el diseño de depende de qué partes para que todo sea “físicamente posible” a pesar de las complicaciones que esto llevaría a la larga.
-
- Hoja de modelo
-

- Observaciones a la hoja de modelo
-

- Perfil general del personaje (una técnica que se usa a menudo en videojuegos para lograr que cada personaje tenga un distintivo visual yno pueda confundirse
Modelado poligonal
Piernas
Empecé por las piernas del modelo porque era lo que me resultaba más familiar por proyectos anteriores en 3ds max.

-
- Raven
Las piernas es de las únicas partes del modelo en las que no preparé un modelo más simple para referencia así que tienen un estilo ligeramente diferente al resto del modelo en cuanto a geometría.
El pie tiene dedos articulables y demás detalles que al final no se han aprovechado del todo debido a la complejidad que lleva poner huesos a todo pero siguen añadiendo detalle al modelo.
Bloqueo de formas del resto del personaje
Después de hacer una simetría de la pierna y modelar la pelvis desde 0 decidí hacer una versión muy simple del resto del cuerpo para que luego fuera más fácil hacer un modelo detallado por encima, empezando por el torso y luego una versión muy rudimentaria del cuerpo entero.
Primero empecé a detallar los brazos y subsecuentemente las manos.
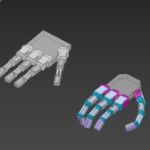
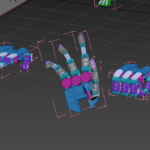
Las manos al no tener suficiente referencia fueron sobre la marcha, tienen una estructura un poco peculiar pero sorprendentemente los huesos no fueron un problema más adelante.
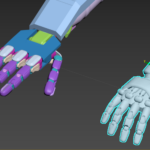
Para las manos como no me acababa de convencer la forma que tenían y mi referencia no me daba los suficientes detalles para más, usé Blender para convertir el modelo 3D de un personaje de un videojuego en un formato que pudiese importar a 3ds max y usarlo como mejor referencia.
Al igual que los pies las manos tienen mas partes que no se aprovechan del todo en el resultado final por limitaciones en los huesos.
Para el resto del brazo ya me bastó con mis imágenes de referencia aunque cambie un poco del diseño original porque no me parecía muy realista.
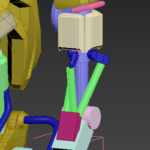
El mecanismo del brazo es complejo cosa que me dio problemas más adelante, pero al ser un detalle tan grande del modelo la gracia era que los pistones fueran funcionales y que solo se doblasen partes específicas del brazo en cada momento
Mientras hacía el brazo aproveché para detallar más el resto del modelo.
Diferentes piezas están hechas de otras maneras al resto del modelo, como por ejemplo los bolsos del pecho son líneas a las que les apliqué varios modificadores y finalmente un edit poly para añadir detalle. Los tubos azules y las cintas rojas entre los bolsos también son líneas convertidas en polígonos.
La mayoría del modelo son formas simples metidas unas dentro de otras (como la cabeza) para tener el aspecto indicado en vez de una sola pieza compleja (como el torso).
Hay una combinación muy diversa de estilos de modelado ya que el proyecto al ser tan complejo me tomó una gran cantidad de tiempo y mi estilo fue cambiando en el progreso.

Fui avanzando todo el resto del cuerpo de manera más o menos igual añadiendo detalles a todas las piezas por igual.
Además de eso en un punto me tomé un poco de libertad creativa y hice otros ejemplos de accesorios para el torso basados en otras referencias que al final no acabé utilizando porque no coincidían con la visión que tenía para el personaje.
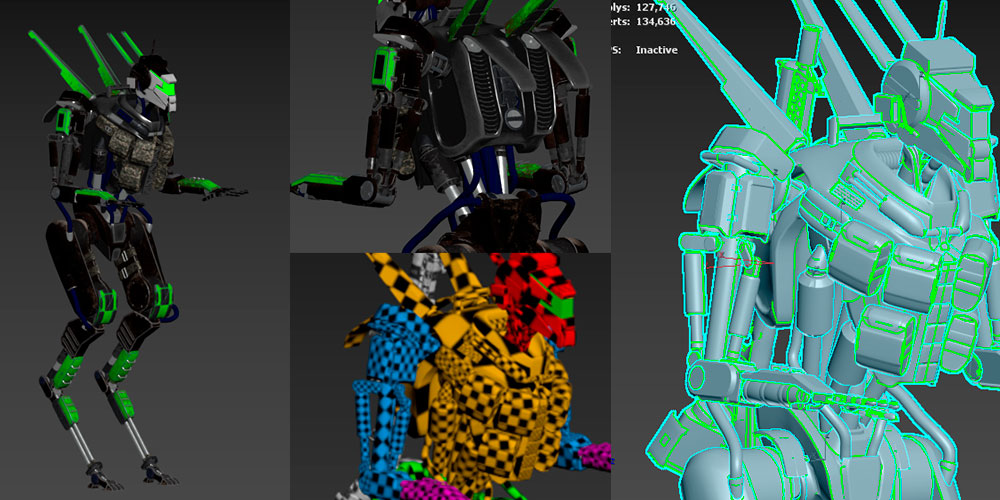
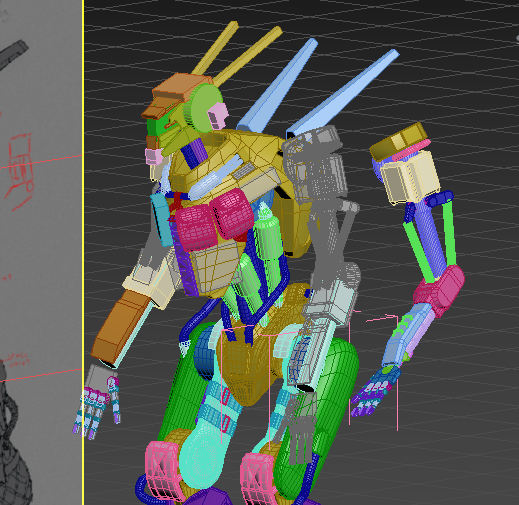
Al final así es como quedó el modelo, a este punto es solo geometría, hay algunas piezas que no he hecho yo como el rifle (rosa) que tiene en la espalda. Hay algunos cambios mínimos después para ajustarlo a los huesos y texturas. Cabe decir que el modelo tiene una malla más o menos densa, unos 150.000 polígonos, si quisiera usarlo en videojuegos o algo menos intensivo habría que reducir la cantidad de estos. Pero al ser para animación y usarlo únicamente en 3ds max al tener una geometría así hay más detalles de lo que se conseguirá con texturas y se consigue un resultado más realista.
Mapping
El modelo se divide en 6 partes, cabeza, torso, manos, pelvis y piernas
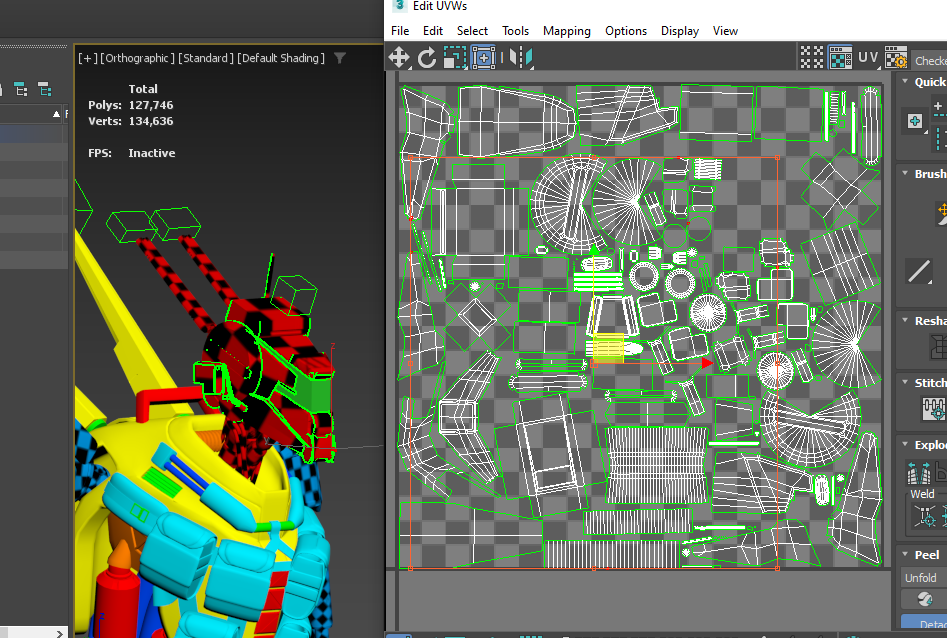
Las múltiples piezas individuales de cada parte están agrupadas y comparten el mismo mapa de UV para ahorrar espacio y aliviar la dificultad de renderizado.
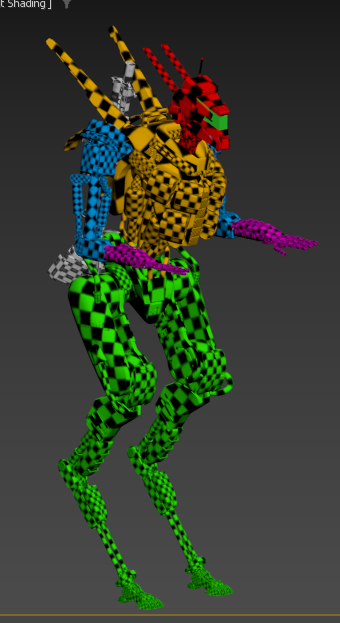
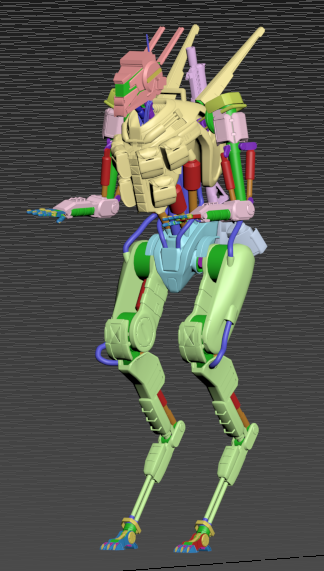
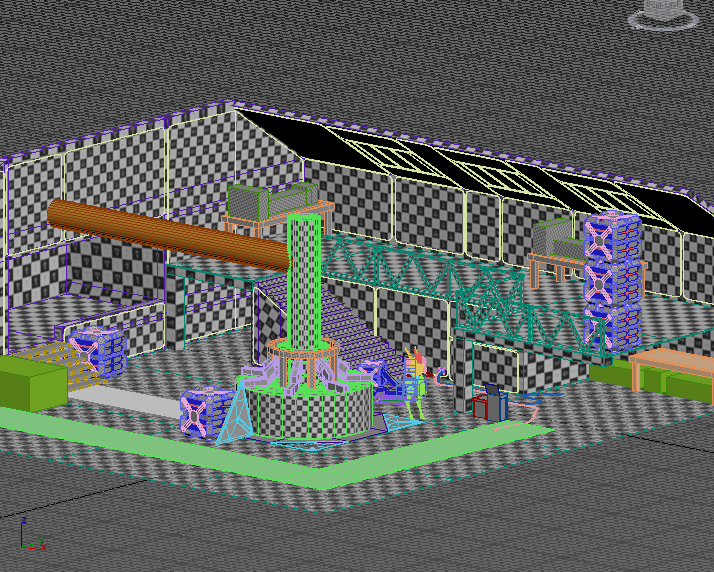
Después de hacer el unwrap de todas las partes las separé por color, con un mapa de bits de cuadros para que se vea que están bien hechas. Las partes blancas son accesorios que no he hecho yo y no forman parte de mi modelo. Una vez hecho esto se puede exportar el modelo a otro programa para hacer los materiales.
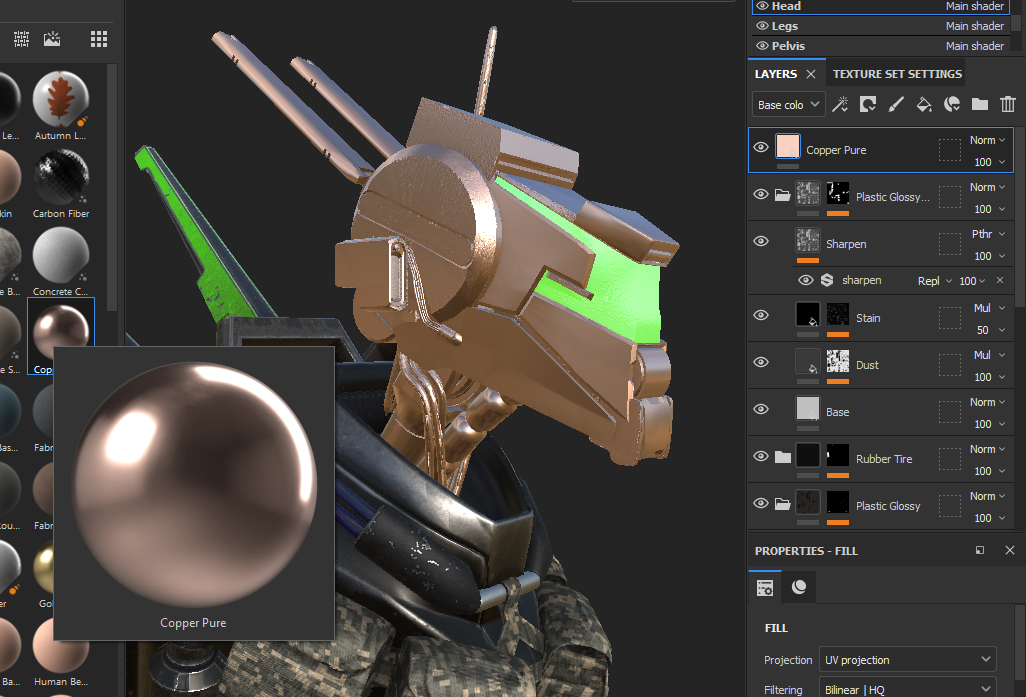
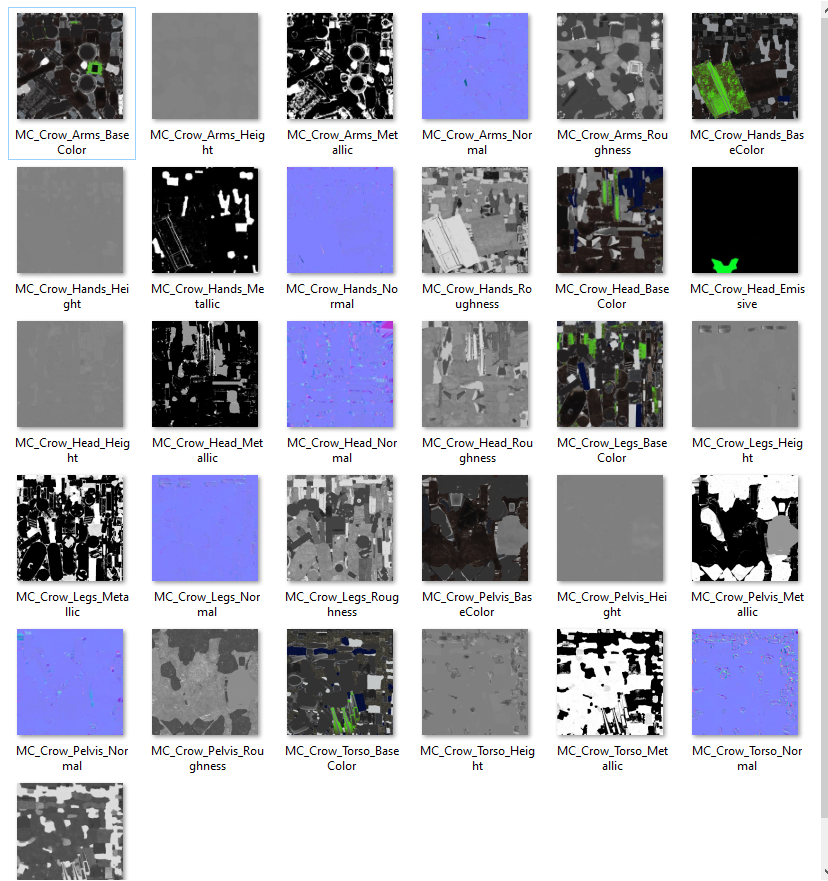
Después de exportar el modelo lo importé en este programa llamado Substance Painter que es un estándar en la industria para hacer texturas a los modelos 3d. Con él pude añadirle a mi modelo detalles que no hubiese podido hacer únicamente con Max. Este dispone de una colección de materiales ya hechos que se pueden arrastrar en el modelo y ajustarlos a medida muy fácilmente
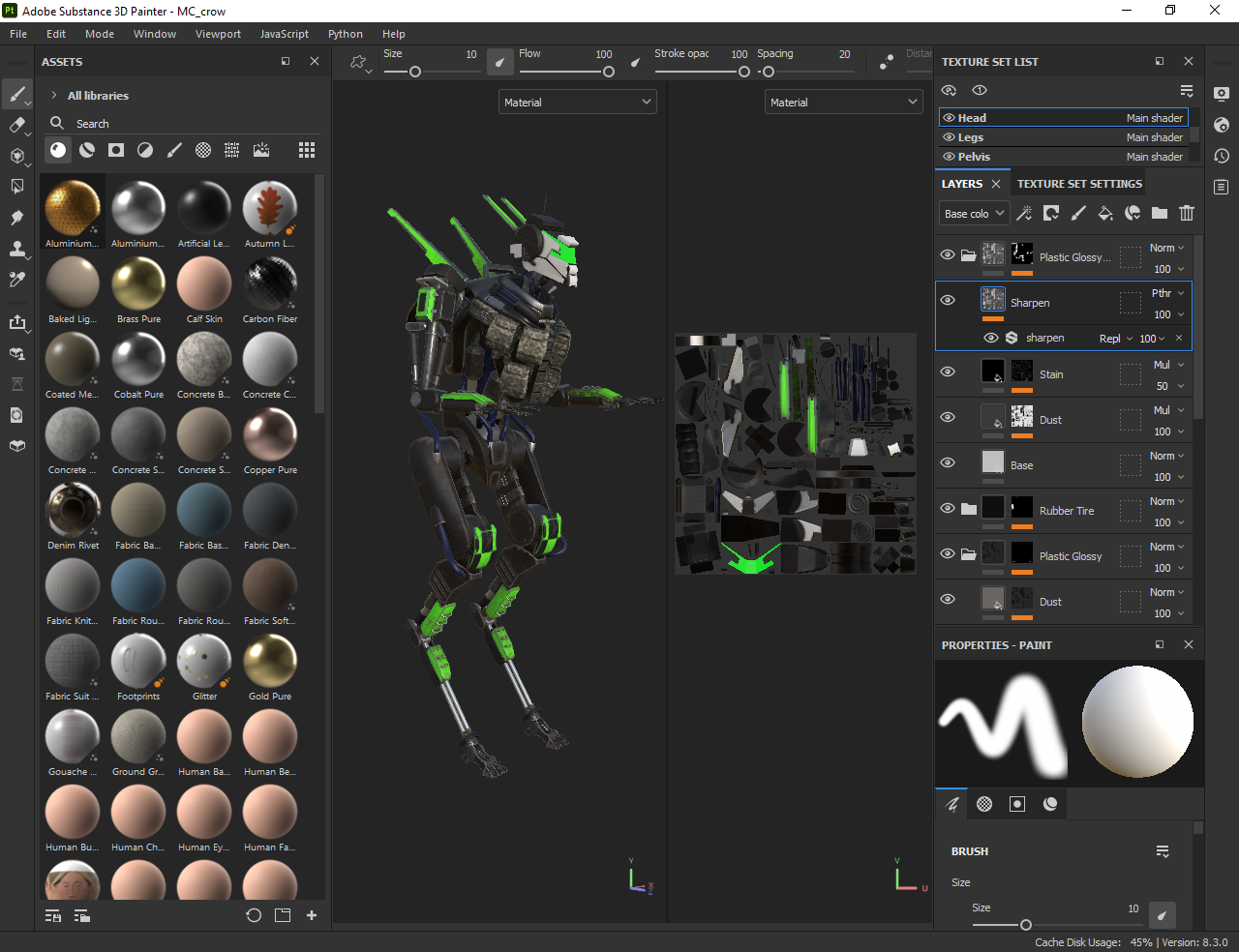
Después de pintar todo el modelo el programa exporta todas las imágenes necesarias que luego se pueden importar directamente a 3ds Max y usar con V-Ray (o cualquier motor de render si se cambian las opciones).
Una vez exportadas las imágenes se pueden importar de vuelta al editor de materiales de 3ds max.
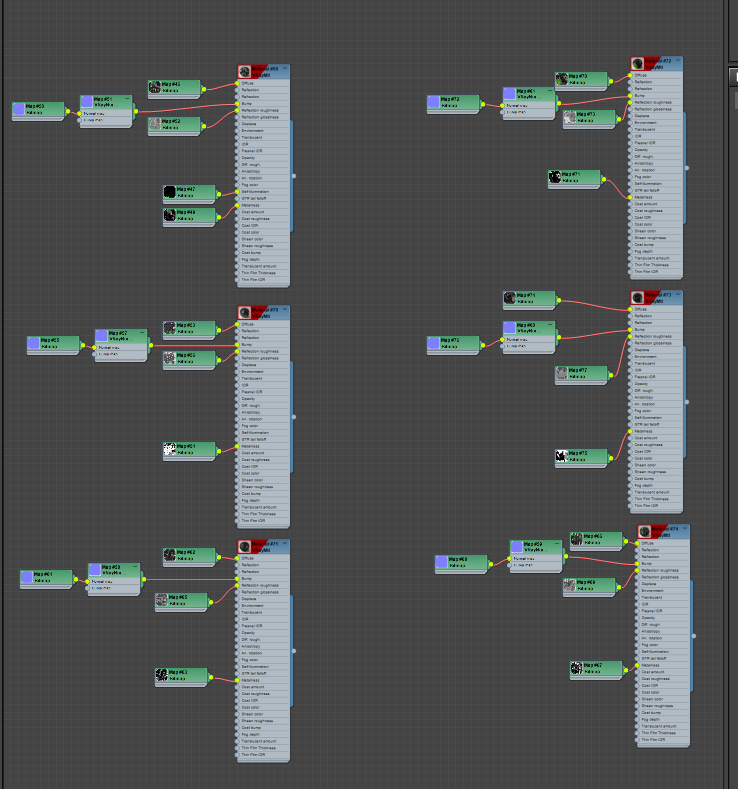

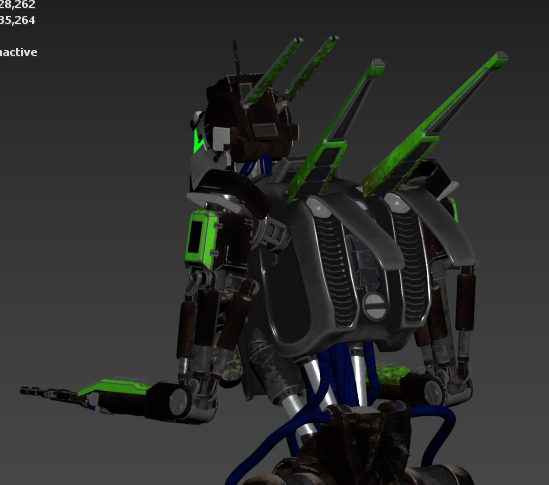
Una vez todas las imágenes están puestas en su sitio y los materiales de V-Ray configurados bien el modelo queda casi igual en 3ds max que en substance. Puede que algunas texturas cambien un poco por la manera de procesar los metales y los reflejos de cada programa pero el resultado está bastante bien.
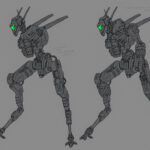
A parte de los colores que tiene actualmente el robot hubieron mas diseños que al final no escogí por una razón u otra, aqui hay dos ejemplos.
Huesos (rig)
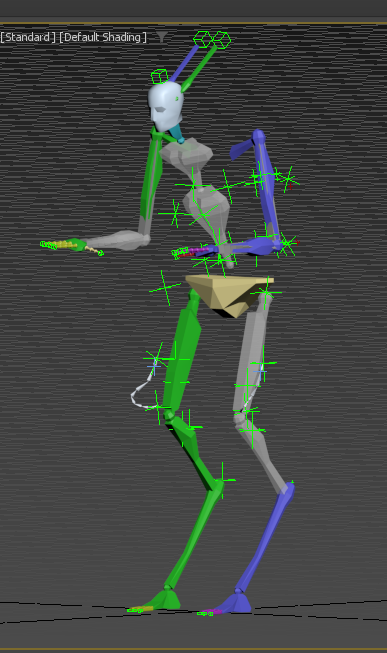
Por la forma no tan humana el robot está cerca de los límites del bipedo de 3ds max, en parte por eso ha habido dificultades con el rigging, pero hacer un esqueleto desde cero para el robot hubiese sido aún más complicado. Aun así aparte de las complicaciones el producto final es bastante decente, aunque si tengo tiempo me gustaría hacerle un rig mejor en un futuro.
Al ser un robot algunas partes han sido fáciles ya que en la mayor parte del modelo solo ha hecho falta hacer un link con las piezas y el hueso directamente. A diferencia de las cosas orgánicas que hacen falta modificadores y más trabajo para que queden bien, gran parte del robot fue ppierfácil, pero por el complicado diseño y los limites del vipedo han habido algunas complicaciones a lo largo del camino.
Piernas.-
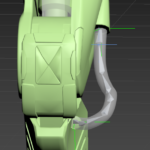
El primer problema fueron los tubos de las piernas que al ser partes que se doblan ya se complica bastante todo, hay dos formas que he usado en el modelo, una para cada parte de la pierna.
La primera es el modificador “Linked Xform” que usa una selección del modelo para asignar que parte hace caso a qué pieza del robot, así se consigue un efecto simple de flexibilidad en el tubo, pero este método tiene sus límites. Cuando el tubo tiene una forma demasiado extraña o se mueve demasiado se rompe la malla y queda mal.
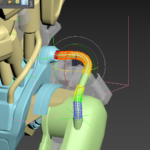
La segunda manera no se rompe como el linked xform, pero es mucho más complicada. Al
hacer huesos específicamente para el tubo y utilizar un modificador de skin. Si se linkean los
huesos correctamente se hace la ilusión de que el tubo se dobla bien.
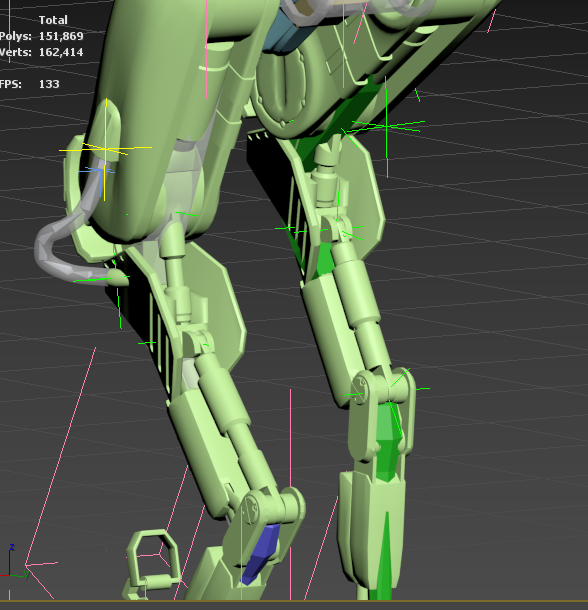
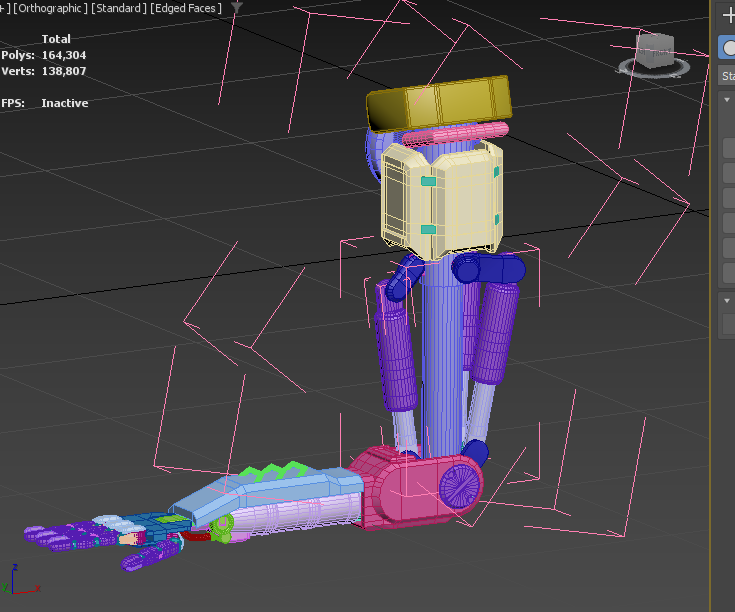
El segundo problema son los pistones que tiene en las articulaciones el robot. Estos se mueven automáticamente cuando se doblan las articulaciones. Esto es posible debido a una serie de ayudantes y “constraints” que tienen que les obliga a alinearse el uno con el otro. Cada uno de los pistones tiene su propio sistema y funcionan sin tener que tocar nada como se puede ver en las piernas, dependiendo del ángulo se orientan automáticamente.
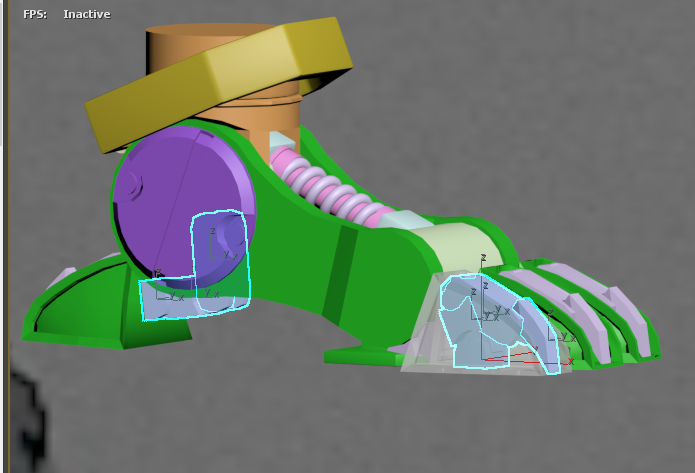
Torso.-

Uno de los más fáciles de montar fue sorprendentemente el del torso. Son solo 4 pistones con el sistema mencionado anteriormente. No están linkeados a ningún hueso solo a los ayudantes (líneas verdes), y esos están pegados a las piezas de arriba y abajo, de esta manera cuando una de ellas se mueve los pistones se ajustan solos .
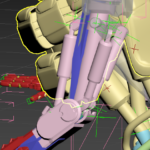
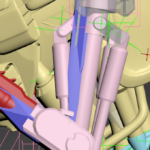
Uno de los más difíciles fue el brazo. A primera vista parece más fácil que el torso, pero al ser 3 pistones diferentes con más puntos de articulación que el resto de pistones del cuerpo montarlo todo fue bastante complicado. Además de que el brazo se puede doblar de muchas maneras y tiene que quedar bien en todas, todo esto añade complejidad al sistema.
Además de los pistones en sí también tuve que idear alguna manera de mover las piezas que los conectan al brazo para que no se atraviese nada cuando se mueve el brazo y una manera para que los huesos solo afecten de cierta manera a partes específicas.
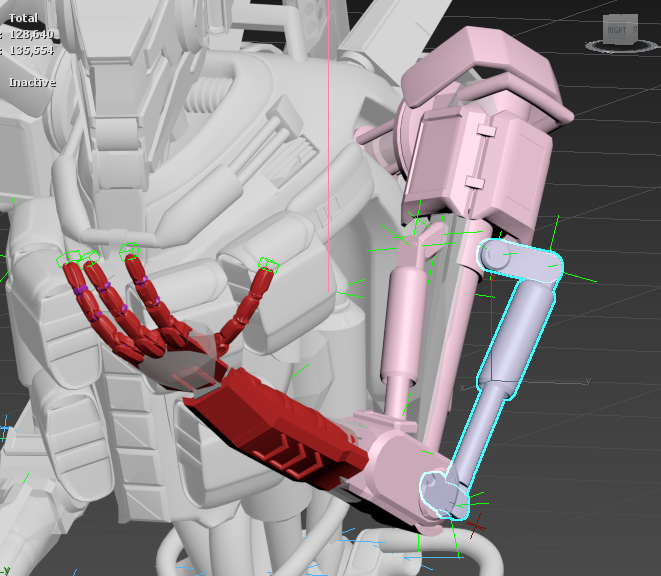
El bipedo al ser hecho para un humano tiene problemas con los ejes que tenía pensados para el robot. Al final conseguí arreglarlo de cierta manera para los brazos, por ejemplo el antebrazo sigue la posición
de la mano sin mover casi la pieza del codo pero aun asi los dos están vinculados al mismo hueso y no se separan al mover el brazo. Esto es posible porque dentro del hueso del brazo hay unos 10 huesos
pequeños que se doblan de manera determinada para que no se rompa el modelo.
Por eso el brazo es una de las cosas que más ha costado hacer en el rig del robot entero.
-
- En algunos casos he usado el modificador de skin, sobretodo en el resto de tubos del torso que no necesitaban un sistema tan complejo como el de las piernas.
-
- El resto de piezas que normalmente no estan en un ser humano simplemente se han podido hacer con funciones del bipedo, por ejemplo las antenas de la cabeza son en teoría coletas.
Retos o técnicas nuevas aprendidas
He aprendido diferentes maneras de modelado poligonal y bastante de la interfaz y uso de las herramientas de 3ds max. Además he aprendido como hacer un rig a un personaje y diferentes maneras de hacerlo.
En general he aumentado bastante mis conocimientos de este programa y de otros como substance painter, el cual he tenido que retomar por este proyecto.
Cosas que han supuesto que mire o investigue y que hayan necesitado un mecanismo o armado especial
En general la mayoría de mecanismos del modelo han sido un reto tanto al modelar como al hacer un rig, averiguar cómo conseguir que funcionasen de la manera que imaginaba al modelar el personaje no fué tarea fácil.
Aparte de eso he aprendido como hacer texturas de elementos complejos como el robot y el fondo del render
Conclusiones
Modelar cosas complejas es difícil pero los huesos lo son aún mas
He aprendido a utilizar una gran cantidad de herramientas de 3Ds max y a hacer proyectos complejos
Me he divertido?
Si (no, ha sido una pesadilla) aunque ha sido divertido ir experimentando con cosas a lo largo de todo el proyecto
Listo para un nuevo modelo?
Si, de hecho ya tengo algunos empezados que me gustaría terminar con la experiencia que he adquirido con todo este trabajo
Aun me queda por dominar el programa y las diferentes maneras de modelado que no se. Pero me gustaria hacer mas modelos orgánicos o de personas o objetos ya que es algo que no he tocado mucho a lo largo de todos mis proyectos